{"title":"寻找通过支持函数定义的集合的广义切比雪夫中心的算法","authors":"P. A. Arkhipov","doi":"10.1134/S0005117924060031","DOIUrl":null,"url":null,"abstract":"<p>This paper is dedicated to an optimization problem. Let <i>A</i>, <i>B</i> ⊂ <span>\\({{\\mathbb{R}}^{n}}\\)</span> be compact convex sets. Consider the minimal number <i>t</i><sup>0</sup> > 0 such that <i>t</i><sup>0</sup><i>B</i> covers <i>A</i> after a shift to a vector <i>x</i><sup>0</sup> ∈ <span>\\({{\\mathbb{R}}^{n}}\\)</span>. The goal is to find <i>t</i><sup>0</sup> and <i>x</i><sup>0</sup>. In the special case of <i>B</i> being a unit ball centered at zero, <i>x</i><sup>0</sup> and <i>t</i><sup>0</sup> are known as the Chebyshev center and the Chebyshev radius of <i>A</i>. This paper focuses on the case in which <i>A</i> and <i>B</i> are defined with their black-box support functions. An algorithm for solving such problems efficiently is suggested. The algorithm has a superlinear convergence rate, and it can solve hundred-dimensional test problems in a reasonable time, but some additional conditions on <i>A</i> and <i>B</i> are required to guarantee the presence of convergence. Additionally, the behavior of the algorithm for a simple special case is investigated, which leads to a number of theoretical results. Perturbations of this special case are also studied.</p>","PeriodicalId":55411,"journal":{"name":"Automation and Remote Control","volume":"85 6","pages":"522 - 532"},"PeriodicalIF":0.5000,"publicationDate":"2024-10-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"An Algorithm for Finding the Generalized Chebyshev Center of Sets Defined via Their Support Functions\",\"authors\":\"P. A. Arkhipov\",\"doi\":\"10.1134/S0005117924060031\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>This paper is dedicated to an optimization problem. Let <i>A</i>, <i>B</i> ⊂ <span>\\\\({{\\\\mathbb{R}}^{n}}\\\\)</span> be compact convex sets. Consider the minimal number <i>t</i><sup>0</sup> > 0 such that <i>t</i><sup>0</sup><i>B</i> covers <i>A</i> after a shift to a vector <i>x</i><sup>0</sup> ∈ <span>\\\\({{\\\\mathbb{R}}^{n}}\\\\)</span>. The goal is to find <i>t</i><sup>0</sup> and <i>x</i><sup>0</sup>. In the special case of <i>B</i> being a unit ball centered at zero, <i>x</i><sup>0</sup> and <i>t</i><sup>0</sup> are known as the Chebyshev center and the Chebyshev radius of <i>A</i>. This paper focuses on the case in which <i>A</i> and <i>B</i> are defined with their black-box support functions. An algorithm for solving such problems efficiently is suggested. The algorithm has a superlinear convergence rate, and it can solve hundred-dimensional test problems in a reasonable time, but some additional conditions on <i>A</i> and <i>B</i> are required to guarantee the presence of convergence. Additionally, the behavior of the algorithm for a simple special case is investigated, which leads to a number of theoretical results. Perturbations of this special case are also studied.</p>\",\"PeriodicalId\":55411,\"journal\":{\"name\":\"Automation and Remote Control\",\"volume\":\"85 6\",\"pages\":\"522 - 532\"},\"PeriodicalIF\":0.5000,\"publicationDate\":\"2024-10-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Automation and Remote Control\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1134/S0005117924060031\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Automation and Remote Control","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1134/S0005117924060031","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
摘要
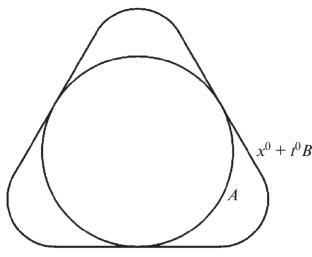
本文专门讨论一个优化问题。设 A, B ⊂ \({{\mathbb{R}}^{n}}\)是紧凑凸集。考虑最小数 t0 > 0,使得 t0B 在移动到向量 x0∈ ({{\mathbb{R}}^{n}}\)后覆盖 A。我们的目标是找到 t0 和 x0。在 B 是以零为中心的单位球的特殊情况下,x0 和 t0 被称为 A 的切比雪夫中心和切比雪夫半径。本文提出了一种高效解决此类问题的算法。该算法具有超线性收敛速度,可以在合理的时间内解决百维测试问题,但需要对 A 和 B 附加一些条件以保证收敛性的存在。此外,我们还研究了该算法在一个简单特例中的行为,并由此得出了一些理论结果。还研究了这种特殊情况的扰动。
An Algorithm for Finding the Generalized Chebyshev Center of Sets Defined via Their Support Functions
This paper is dedicated to an optimization problem. Let A, B ⊂ \({{\mathbb{R}}^{n}}\) be compact convex sets. Consider the minimal number t0 > 0 such that t0B covers A after a shift to a vector x0 ∈ \({{\mathbb{R}}^{n}}\). The goal is to find t0 and x0. In the special case of B being a unit ball centered at zero, x0 and t0 are known as the Chebyshev center and the Chebyshev radius of A. This paper focuses on the case in which A and B are defined with their black-box support functions. An algorithm for solving such problems efficiently is suggested. The algorithm has a superlinear convergence rate, and it can solve hundred-dimensional test problems in a reasonable time, but some additional conditions on A and B are required to guarantee the presence of convergence. Additionally, the behavior of the algorithm for a simple special case is investigated, which leads to a number of theoretical results. Perturbations of this special case are also studied.
期刊介绍:
Automation and Remote Control is one of the first journals on control theory. The scope of the journal is control theory problems and applications. The journal publishes reviews, original articles, and short communications (deterministic, stochastic, adaptive, and robust formulations) and its applications (computer control, components and instruments, process control, social and economy control, etc.).




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
