{"title":"非稳态参数变化和有界外部扰动下的多变量系统鲁棒控制器设计","authors":"V. N. Chestnov, D. V. Shatov","doi":"10.1134/S0005117924060055","DOIUrl":null,"url":null,"abstract":"<p>This paper considers linear multivariable systems with physical parameters varying from their known nominal values in an arbitrary and nonstationary manner. The plant is subjected to polyharmonic external disturbances containing an arbitrary number of unknown frequencies with unknown amplitudes having a bounded sum. The problem is to design a controller that robustly stabilizes the closed loop system and ensures desired errors for the controlled variables of the plant with nominal parameters in the steady-state mode. The system equations of the original problem are represented in the (<i>W</i>, Λ, <i>K</i>)-form; for this form, the standard <i>H</i><sub>∞</sub> optimization problem is stated and solved. The desired accuracy of the system is achieved by analytically assigning the weight matrix of the controlled variables. The controller design method is illustrated by an example of solving a well-known benchmark problem.</p>","PeriodicalId":55411,"journal":{"name":"Automation and Remote Control","volume":"85 6","pages":"489 - 501"},"PeriodicalIF":0.6000,"publicationDate":"2024-10-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Robust Controller Design for Multivariable Systems under Nonstationary Parametric Variations and Bounded External Disturbances\",\"authors\":\"V. N. Chestnov, D. V. Shatov\",\"doi\":\"10.1134/S0005117924060055\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>This paper considers linear multivariable systems with physical parameters varying from their known nominal values in an arbitrary and nonstationary manner. The plant is subjected to polyharmonic external disturbances containing an arbitrary number of unknown frequencies with unknown amplitudes having a bounded sum. The problem is to design a controller that robustly stabilizes the closed loop system and ensures desired errors for the controlled variables of the plant with nominal parameters in the steady-state mode. The system equations of the original problem are represented in the (<i>W</i>, Λ, <i>K</i>)-form; for this form, the standard <i>H</i><sub>∞</sub> optimization problem is stated and solved. The desired accuracy of the system is achieved by analytically assigning the weight matrix of the controlled variables. The controller design method is illustrated by an example of solving a well-known benchmark problem.</p>\",\"PeriodicalId\":55411,\"journal\":{\"name\":\"Automation and Remote Control\",\"volume\":\"85 6\",\"pages\":\"489 - 501\"},\"PeriodicalIF\":0.6000,\"publicationDate\":\"2024-10-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Automation and Remote Control\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1134/S0005117924060055\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Automation and Remote Control","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1134/S0005117924060055","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Robust Controller Design for Multivariable Systems under Nonstationary Parametric Variations and Bounded External Disturbances
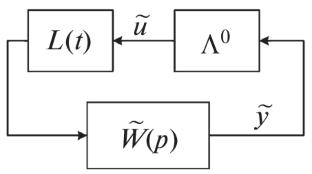
This paper considers linear multivariable systems with physical parameters varying from their known nominal values in an arbitrary and nonstationary manner. The plant is subjected to polyharmonic external disturbances containing an arbitrary number of unknown frequencies with unknown amplitudes having a bounded sum. The problem is to design a controller that robustly stabilizes the closed loop system and ensures desired errors for the controlled variables of the plant with nominal parameters in the steady-state mode. The system equations of the original problem are represented in the (W, Λ, K)-form; for this form, the standard H∞ optimization problem is stated and solved. The desired accuracy of the system is achieved by analytically assigning the weight matrix of the controlled variables. The controller design method is illustrated by an example of solving a well-known benchmark problem.
期刊介绍:
Automation and Remote Control is one of the first journals on control theory. The scope of the journal is control theory problems and applications. The journal publishes reviews, original articles, and short communications (deterministic, stochastic, adaptive, and robust formulations) and its applications (computer control, components and instruments, process control, social and economy control, etc.).




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
