Titus Quah, Kevin J. Modica, James B. Rawlings and Sho C. Takatori
{"title":"非交互活动布朗粒子的模型预测控制。","authors":"Titus Quah, Kevin J. Modica, James B. Rawlings and Sho C. Takatori","doi":"10.1039/D4SM00902A","DOIUrl":null,"url":null,"abstract":"<p >Active matter systems are strongly driven to assume non-equilibrium distributions owing to their self-propulsion, <em>e.g.</em>, flocking and clustering. Controlling the active matter systems' spatiotemporal distributions offers exciting applications such as directed assembly, programmable materials, and microfluidic actuation. However, these applications involve environments with coupled dynamics and complex tasks, making intuitive control strategies insufficient. This necessitates the development of an automatic feedback control framework, where an algorithm determines appropriate actions based on the system's current state. In this work, we control the distribution of active Brownian particles by applying model predictive control (MPC), a model-based control algorithm that predicts future states and optimizes the control inputs to drive the system along a user-defined objective. The MPC model is based on the Smoluchowski equation with a self-propulsive convective term and an actuated spatiotemporal-varying external field that aligns particles with the applied direction, similar to a magnetic field. We apply the MPC framework to control a Brownian dynamics simulation of non-interacting active particles and illustrate the controller capabilities with two objectives: splitting and juggling sub-populations, and polar order flocking control.</p>","PeriodicalId":103,"journal":{"name":"Soft Matter","volume":" 43","pages":" 8581-8588"},"PeriodicalIF":2.8000,"publicationDate":"2024-10-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Model predictive control of non-interacting active Brownian particles†\",\"authors\":\"Titus Quah, Kevin J. Modica, James B. Rawlings and Sho C. Takatori\",\"doi\":\"10.1039/D4SM00902A\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p >Active matter systems are strongly driven to assume non-equilibrium distributions owing to their self-propulsion, <em>e.g.</em>, flocking and clustering. Controlling the active matter systems' spatiotemporal distributions offers exciting applications such as directed assembly, programmable materials, and microfluidic actuation. However, these applications involve environments with coupled dynamics and complex tasks, making intuitive control strategies insufficient. This necessitates the development of an automatic feedback control framework, where an algorithm determines appropriate actions based on the system's current state. In this work, we control the distribution of active Brownian particles by applying model predictive control (MPC), a model-based control algorithm that predicts future states and optimizes the control inputs to drive the system along a user-defined objective. The MPC model is based on the Smoluchowski equation with a self-propulsive convective term and an actuated spatiotemporal-varying external field that aligns particles with the applied direction, similar to a magnetic field. We apply the MPC framework to control a Brownian dynamics simulation of non-interacting active particles and illustrate the controller capabilities with two objectives: splitting and juggling sub-populations, and polar order flocking control.</p>\",\"PeriodicalId\":103,\"journal\":{\"name\":\"Soft Matter\",\"volume\":\" 43\",\"pages\":\" 8581-8588\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2024-10-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Soft Matter\",\"FirstCategoryId\":\"92\",\"ListUrlMain\":\"https://pubs.rsc.org/en/content/articlelanding/2024/sm/d4sm00902a\",\"RegionNum\":3,\"RegionCategory\":\"化学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"CHEMISTRY, PHYSICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Soft Matter","FirstCategoryId":"92","ListUrlMain":"https://pubs.rsc.org/en/content/articlelanding/2024/sm/d4sm00902a","RegionNum":3,"RegionCategory":"化学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"CHEMISTRY, PHYSICAL","Score":null,"Total":0}
Model predictive control of non-interacting active Brownian particles†
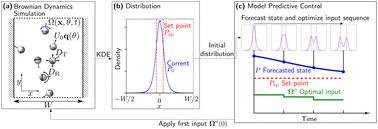
Active matter systems are strongly driven to assume non-equilibrium distributions owing to their self-propulsion, e.g., flocking and clustering. Controlling the active matter systems' spatiotemporal distributions offers exciting applications such as directed assembly, programmable materials, and microfluidic actuation. However, these applications involve environments with coupled dynamics and complex tasks, making intuitive control strategies insufficient. This necessitates the development of an automatic feedback control framework, where an algorithm determines appropriate actions based on the system's current state. In this work, we control the distribution of active Brownian particles by applying model predictive control (MPC), a model-based control algorithm that predicts future states and optimizes the control inputs to drive the system along a user-defined objective. The MPC model is based on the Smoluchowski equation with a self-propulsive convective term and an actuated spatiotemporal-varying external field that aligns particles with the applied direction, similar to a magnetic field. We apply the MPC framework to control a Brownian dynamics simulation of non-interacting active particles and illustrate the controller capabilities with two objectives: splitting and juggling sub-populations, and polar order flocking control.
期刊介绍:
Soft Matter is an international journal published by the Royal Society of Chemistry using Engineering-Materials Science: A Synthesis as its research focus. It publishes original research articles, review articles, and synthesis articles related to this field, reporting the latest discoveries in the relevant theoretical, practical, and applied disciplines in a timely manner, and aims to promote the rapid exchange of scientific information in this subject area. The journal is an open access journal. The journal is an open access journal and has not been placed on the alert list in the last three years.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
