{"title":"基于 EMG 和 SSVEP 的肘部角度轨迹双模态估算。","authors":"Fatemeh Davarinia, Ali Maleki","doi":"10.1016/j.neuroscience.2024.10.030","DOIUrl":null,"url":null,"abstract":"<div><div>Detecting intentions and estimating movement trajectories in a human–machine interface (HMI) using electromyogram (EMG) signals is particularly challenging, especially for individuals with movement impairments. Therefore, incorporating additional information from other biological sources, potential discrete information in the movement, and the EMG signal can be practical. This study combined EMG and target information to enhance estimation performance during reaching movements. EMG activity of the shoulder and arm muscles, elbow angle, and the electroencephalogram signals of ten healthy subjects were recorded while they reached blinking targets. The reaching target was recognized by steady-state visual evoked potential (SSVEP). The selected target’s final angle and EMG were then mapped to the elbow angle trajectory. The proposed bimodal structure, which integrates EMG and final elbow angle information, outperformed the EMG-based decoder. Even under conditions of higher fatigue, the proposed structure provided better performance than the EMG decoder. Including additional information about the recognized reaching target in the trajectory model improved the estimation of the reaching profile. Consequently, this study’s findings suggest that bimodal decoders are highly beneficial for enhancing assistive robotic devices and prostheses, especially for real-time upper limb rehabilitation.</div></div>","PeriodicalId":19142,"journal":{"name":"Neuroscience","volume":"562 ","pages":"Pages 1-9"},"PeriodicalIF":2.8000,"publicationDate":"2024-12-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"EMG and SSVEP-based bimodal estimation of elbow angle trajectory\",\"authors\":\"Fatemeh Davarinia, Ali Maleki\",\"doi\":\"10.1016/j.neuroscience.2024.10.030\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>Detecting intentions and estimating movement trajectories in a human–machine interface (HMI) using electromyogram (EMG) signals is particularly challenging, especially for individuals with movement impairments. Therefore, incorporating additional information from other biological sources, potential discrete information in the movement, and the EMG signal can be practical. This study combined EMG and target information to enhance estimation performance during reaching movements. EMG activity of the shoulder and arm muscles, elbow angle, and the electroencephalogram signals of ten healthy subjects were recorded while they reached blinking targets. The reaching target was recognized by steady-state visual evoked potential (SSVEP). The selected target’s final angle and EMG were then mapped to the elbow angle trajectory. The proposed bimodal structure, which integrates EMG and final elbow angle information, outperformed the EMG-based decoder. Even under conditions of higher fatigue, the proposed structure provided better performance than the EMG decoder. Including additional information about the recognized reaching target in the trajectory model improved the estimation of the reaching profile. Consequently, this study’s findings suggest that bimodal decoders are highly beneficial for enhancing assistive robotic devices and prostheses, especially for real-time upper limb rehabilitation.</div></div>\",\"PeriodicalId\":19142,\"journal\":{\"name\":\"Neuroscience\",\"volume\":\"562 \",\"pages\":\"Pages 1-9\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2024-12-06\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Neuroscience\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0306452224005414\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/10/23 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q2\",\"JCRName\":\"NEUROSCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Neuroscience","FirstCategoryId":"3","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0306452224005414","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/10/23 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"NEUROSCIENCES","Score":null,"Total":0}
EMG and SSVEP-based bimodal estimation of elbow angle trajectory
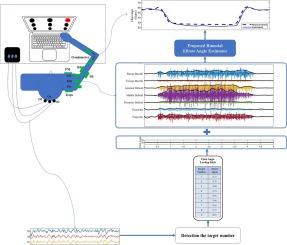
Detecting intentions and estimating movement trajectories in a human–machine interface (HMI) using electromyogram (EMG) signals is particularly challenging, especially for individuals with movement impairments. Therefore, incorporating additional information from other biological sources, potential discrete information in the movement, and the EMG signal can be practical. This study combined EMG and target information to enhance estimation performance during reaching movements. EMG activity of the shoulder and arm muscles, elbow angle, and the electroencephalogram signals of ten healthy subjects were recorded while they reached blinking targets. The reaching target was recognized by steady-state visual evoked potential (SSVEP). The selected target’s final angle and EMG were then mapped to the elbow angle trajectory. The proposed bimodal structure, which integrates EMG and final elbow angle information, outperformed the EMG-based decoder. Even under conditions of higher fatigue, the proposed structure provided better performance than the EMG decoder. Including additional information about the recognized reaching target in the trajectory model improved the estimation of the reaching profile. Consequently, this study’s findings suggest that bimodal decoders are highly beneficial for enhancing assistive robotic devices and prostheses, especially for real-time upper limb rehabilitation.
期刊介绍:
Neuroscience publishes papers describing the results of original research on any aspect of the scientific study of the nervous system. Any paper, however short, will be considered for publication provided that it reports significant, new and carefully confirmed findings with full experimental details.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
