{"title":"TL-CStrans Net:通过 CS 变压器驱动的乒乓球运动员动作识别视觉机器人。","authors":"Libo Ma, Yan Tong","doi":"10.3389/fnbot.2024.1443177","DOIUrl":null,"url":null,"abstract":"<p><p>Currently, the application of robotics technology in sports training and competitions is rapidly increasing. Traditional methods mainly rely on image or video data, neglecting the effective utilization of textual information. To address this issue, we propose: TL-CStrans Net: A vision robot for table tennis player action recognition driven via CS-Transformer. This is a multimodal approach that combines CS-Transformer, CLIP, and transfer learning techniques to effectively integrate visual and textual information. Firstly, we employ the CS-Transformer model as the neural computing backbone. By utilizing the CS-Transformer, we can effectively process visual information extracted from table tennis game scenes, enabling accurate stroke recognition. Then, we introduce the CLIP model, which combines computer vision and natural language processing. CLIP allows us to jointly learn representations of images and text, thereby aligning the visual and textual modalities. Finally, to reduce training and computational requirements, we leverage pre-trained CS-Transformer and CLIP models through transfer learning, which have already acquired knowledge from relevant domains, and apply them to table tennis stroke recognition tasks. Experimental results demonstrate the outstanding performance of TL-CStrans Net in table tennis stroke recognition. Our research is of significant importance in promoting the application of multimodal robotics technology in the field of sports and bridging the gap between neural computing, computer vision, and neuroscience.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"18 ","pages":"1443177"},"PeriodicalIF":2.8000,"publicationDate":"2024-10-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11532032/pdf/","citationCount":"0","resultStr":"{\"title\":\"TL-CStrans Net: a vision robot for table tennis player action recognition driven via CS-Transformer.\",\"authors\":\"Libo Ma, Yan Tong\",\"doi\":\"10.3389/fnbot.2024.1443177\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Currently, the application of robotics technology in sports training and competitions is rapidly increasing. Traditional methods mainly rely on image or video data, neglecting the effective utilization of textual information. To address this issue, we propose: TL-CStrans Net: A vision robot for table tennis player action recognition driven via CS-Transformer. This is a multimodal approach that combines CS-Transformer, CLIP, and transfer learning techniques to effectively integrate visual and textual information. Firstly, we employ the CS-Transformer model as the neural computing backbone. By utilizing the CS-Transformer, we can effectively process visual information extracted from table tennis game scenes, enabling accurate stroke recognition. Then, we introduce the CLIP model, which combines computer vision and natural language processing. CLIP allows us to jointly learn representations of images and text, thereby aligning the visual and textual modalities. Finally, to reduce training and computational requirements, we leverage pre-trained CS-Transformer and CLIP models through transfer learning, which have already acquired knowledge from relevant domains, and apply them to table tennis stroke recognition tasks. Experimental results demonstrate the outstanding performance of TL-CStrans Net in table tennis stroke recognition. Our research is of significant importance in promoting the application of multimodal robotics technology in the field of sports and bridging the gap between neural computing, computer vision, and neuroscience.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"18 \",\"pages\":\"1443177\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2024-10-21\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11532032/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2024.1443177\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2024.1443177","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
TL-CStrans Net: a vision robot for table tennis player action recognition driven via CS-Transformer.
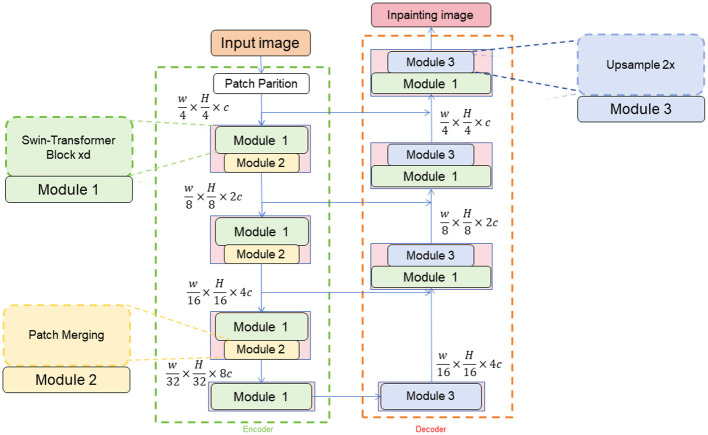
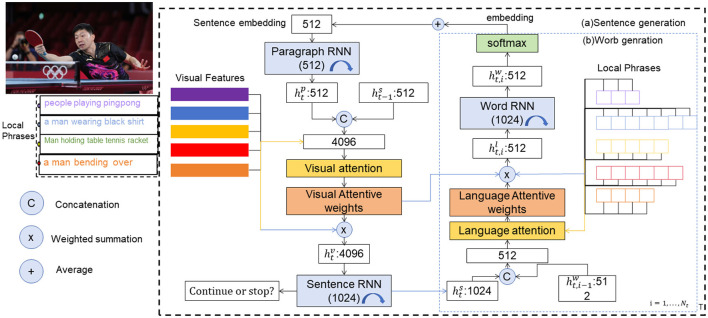
Currently, the application of robotics technology in sports training and competitions is rapidly increasing. Traditional methods mainly rely on image or video data, neglecting the effective utilization of textual information. To address this issue, we propose: TL-CStrans Net: A vision robot for table tennis player action recognition driven via CS-Transformer. This is a multimodal approach that combines CS-Transformer, CLIP, and transfer learning techniques to effectively integrate visual and textual information. Firstly, we employ the CS-Transformer model as the neural computing backbone. By utilizing the CS-Transformer, we can effectively process visual information extracted from table tennis game scenes, enabling accurate stroke recognition. Then, we introduce the CLIP model, which combines computer vision and natural language processing. CLIP allows us to jointly learn representations of images and text, thereby aligning the visual and textual modalities. Finally, to reduce training and computational requirements, we leverage pre-trained CS-Transformer and CLIP models through transfer learning, which have already acquired knowledge from relevant domains, and apply them to table tennis stroke recognition tasks. Experimental results demonstrate the outstanding performance of TL-CStrans Net in table tennis stroke recognition. Our research is of significant importance in promoting the application of multimodal robotics technology in the field of sports and bridging the gap between neural computing, computer vision, and neuroscience.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
