Luca Giamattei, Matteo Biagiola, Roberto Pietrantuono, Stefano Russo, Paolo Tonella
{"title":"用于自动驾驶系统在线测试的强化学习:一项复制和扩展研究。","authors":"Luca Giamattei, Matteo Biagiola, Roberto Pietrantuono, Stefano Russo, Paolo Tonella","doi":"10.1007/s10664-024-10562-5","DOIUrl":null,"url":null,"abstract":"<p><p>In a recent study, Reinforcement Learning (RL) used in combination with many-objective search, has been shown to outperform alternative techniques (random search and many-objective search) for online testing of Deep Neural Network-enabled systems. The empirical evaluation of these techniques was conducted on a state-of-the-art Autonomous Driving System (ADS). This work is a replication and extension of that empirical study. Our replication shows that RL does not outperform pure random test generation in a comparison conducted under the same settings of the original study, but with no confounding factor coming from the way collisions are measured. Our extension aims at eliminating some of the possible reasons for the poor performance of RL observed in our replication: (1) the presence of reward components providing contrasting feedback to the RL agent; (2) the usage of an RL algorithm (Q-learning) which requires discretization of an intrinsically continuous state space. Results show that our new RL agent is able to converge to an effective policy that outperforms random search. Results also highlight other possible improvements, which open to further investigations on how to best leverage RL for online ADS testing.</p>","PeriodicalId":11525,"journal":{"name":"Empirical Software Engineering","volume":"30 1","pages":"19"},"PeriodicalIF":3.4000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11538197/pdf/","citationCount":"0","resultStr":"{\"title\":\"Reinforcement learning for online testing of autonomous driving systems: a replication and extension study.\",\"authors\":\"Luca Giamattei, Matteo Biagiola, Roberto Pietrantuono, Stefano Russo, Paolo Tonella\",\"doi\":\"10.1007/s10664-024-10562-5\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>In a recent study, Reinforcement Learning (RL) used in combination with many-objective search, has been shown to outperform alternative techniques (random search and many-objective search) for online testing of Deep Neural Network-enabled systems. The empirical evaluation of these techniques was conducted on a state-of-the-art Autonomous Driving System (ADS). This work is a replication and extension of that empirical study. Our replication shows that RL does not outperform pure random test generation in a comparison conducted under the same settings of the original study, but with no confounding factor coming from the way collisions are measured. Our extension aims at eliminating some of the possible reasons for the poor performance of RL observed in our replication: (1) the presence of reward components providing contrasting feedback to the RL agent; (2) the usage of an RL algorithm (Q-learning) which requires discretization of an intrinsically continuous state space. Results show that our new RL agent is able to converge to an effective policy that outperforms random search. Results also highlight other possible improvements, which open to further investigations on how to best leverage RL for online ADS testing.</p>\",\"PeriodicalId\":11525,\"journal\":{\"name\":\"Empirical Software Engineering\",\"volume\":\"30 1\",\"pages\":\"19\"},\"PeriodicalIF\":3.4000,\"publicationDate\":\"2025-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11538197/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Empirical Software Engineering\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s10664-024-10562-5\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/11/5 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, SOFTWARE ENGINEERING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Empirical Software Engineering","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s10664-024-10562-5","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/5 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"COMPUTER SCIENCE, SOFTWARE ENGINEERING","Score":null,"Total":0}
Reinforcement learning for online testing of autonomous driving systems: a replication and extension study.
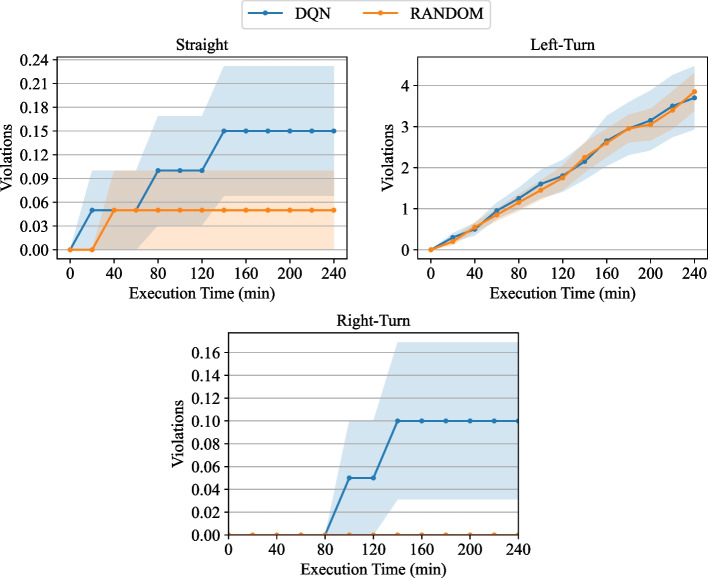
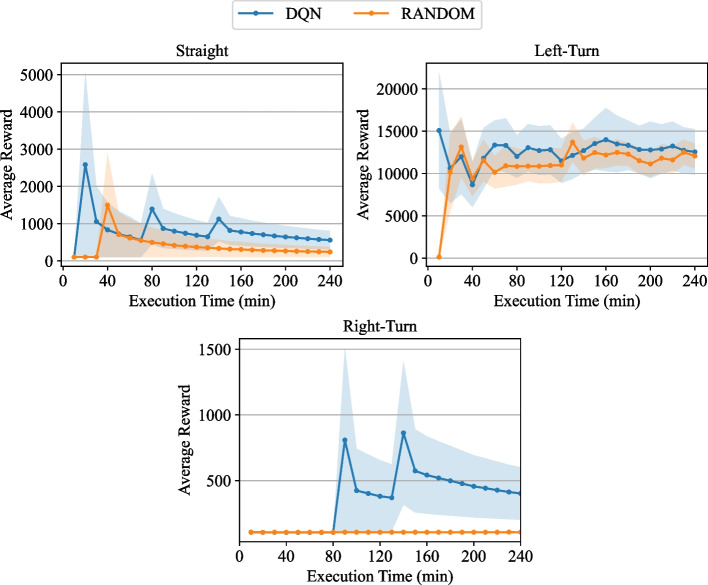
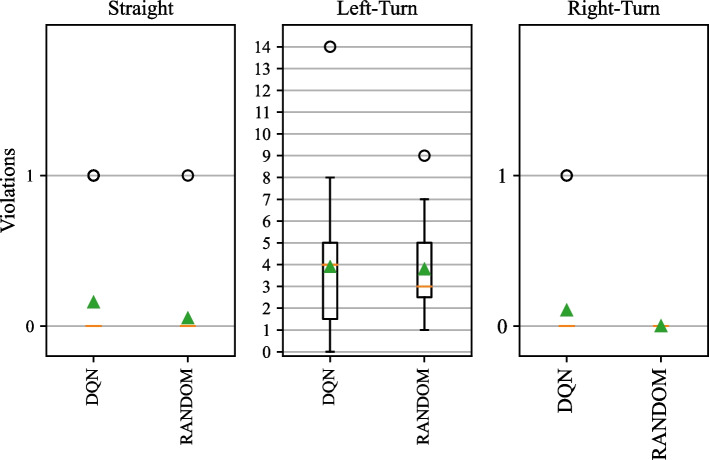
In a recent study, Reinforcement Learning (RL) used in combination with many-objective search, has been shown to outperform alternative techniques (random search and many-objective search) for online testing of Deep Neural Network-enabled systems. The empirical evaluation of these techniques was conducted on a state-of-the-art Autonomous Driving System (ADS). This work is a replication and extension of that empirical study. Our replication shows that RL does not outperform pure random test generation in a comparison conducted under the same settings of the original study, but with no confounding factor coming from the way collisions are measured. Our extension aims at eliminating some of the possible reasons for the poor performance of RL observed in our replication: (1) the presence of reward components providing contrasting feedback to the RL agent; (2) the usage of an RL algorithm (Q-learning) which requires discretization of an intrinsically continuous state space. Results show that our new RL agent is able to converge to an effective policy that outperforms random search. Results also highlight other possible improvements, which open to further investigations on how to best leverage RL for online ADS testing.
期刊介绍:
Empirical Software Engineering provides a forum for applied software engineering research with a strong empirical component, and a venue for publishing empirical results relevant to both researchers and practitioners. Empirical studies presented here usually involve the collection and analysis of data and experience that can be used to characterize, evaluate and reveal relationships between software development deliverables, practices, and technologies. Over time, it is expected that such empirical results will form a body of knowledge leading to widely accepted and well-formed theories.
The journal also offers industrial experience reports detailing the application of software technologies - processes, methods, or tools - and their effectiveness in industrial settings.
Empirical Software Engineering promotes the publication of industry-relevant research, to address the significant gap between research and practice.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
