Haoran Ding , Shijun Ji , Yongkang An , Ji Zhao , Guofa Li
{"title":"模仿波浪运动设计的结构紧凑的高速致动器","authors":"Haoran Ding , Shijun Ji , Yongkang An , Ji Zhao , Guofa Li","doi":"10.1016/j.ijmecsci.2024.109814","DOIUrl":null,"url":null,"abstract":"<div><div>By imitating the natural phenomenon of waves pushing leaves, a compact novel wave-type piezoelectric actuator is proposed in this paper. Compared to traditional inchworm piezoelectric actuators, it combines the clamping unit and driving unit into an arc-shaped flexible driving foot (AFDF). Clamping and driving functions are realized by alternately controlling two ends of the AFDF using two piezoelectric stacks (PESs). One motion unit instead of two makes control simpler, the structure more compact and a faster movement speed. The static model of the AFDF is developed to characterize the mapping laws between structural dimensions and actuator amplification ratios, and the dynamic model represents the relationship between the control signals and move displacements, thus demonstrating the feasibility of the actuator. Finally, a prototype was fabricated, and a testing system was set up to conduct performance evaluations of its motion capabilities. At the driving frequencies of 370 Hz and 380 Hz, the maximum forward and reverse motion speeds can reach 4.345mm/s and 4.537mm/s, respectively. In the range of 0.1–10 N, there is no significant change in motion speed, and it has good stability. Its resolution for forward and reverse motion can reach 106 nm and 109 nm, respectively.</div></div>","PeriodicalId":56287,"journal":{"name":"International Journal of Mechanical Sciences","volume":"285 ","pages":"Article 109814"},"PeriodicalIF":9.4000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A compact structure and high-speed actuator designed by imitating the movement of wave\",\"authors\":\"Haoran Ding , Shijun Ji , Yongkang An , Ji Zhao , Guofa Li\",\"doi\":\"10.1016/j.ijmecsci.2024.109814\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>By imitating the natural phenomenon of waves pushing leaves, a compact novel wave-type piezoelectric actuator is proposed in this paper. Compared to traditional inchworm piezoelectric actuators, it combines the clamping unit and driving unit into an arc-shaped flexible driving foot (AFDF). Clamping and driving functions are realized by alternately controlling two ends of the AFDF using two piezoelectric stacks (PESs). One motion unit instead of two makes control simpler, the structure more compact and a faster movement speed. The static model of the AFDF is developed to characterize the mapping laws between structural dimensions and actuator amplification ratios, and the dynamic model represents the relationship between the control signals and move displacements, thus demonstrating the feasibility of the actuator. Finally, a prototype was fabricated, and a testing system was set up to conduct performance evaluations of its motion capabilities. At the driving frequencies of 370 Hz and 380 Hz, the maximum forward and reverse motion speeds can reach 4.345mm/s and 4.537mm/s, respectively. In the range of 0.1–10 N, there is no significant change in motion speed, and it has good stability. Its resolution for forward and reverse motion can reach 106 nm and 109 nm, respectively.</div></div>\",\"PeriodicalId\":56287,\"journal\":{\"name\":\"International Journal of Mechanical Sciences\",\"volume\":\"285 \",\"pages\":\"Article 109814\"},\"PeriodicalIF\":9.4000,\"publicationDate\":\"2025-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Mechanical Sciences\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0020740324008555\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/11/9 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MECHANICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Mechanical Sciences","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0020740324008555","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/9 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
A compact structure and high-speed actuator designed by imitating the movement of wave
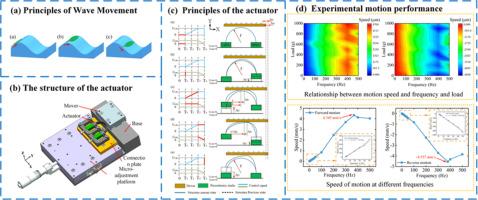
By imitating the natural phenomenon of waves pushing leaves, a compact novel wave-type piezoelectric actuator is proposed in this paper. Compared to traditional inchworm piezoelectric actuators, it combines the clamping unit and driving unit into an arc-shaped flexible driving foot (AFDF). Clamping and driving functions are realized by alternately controlling two ends of the AFDF using two piezoelectric stacks (PESs). One motion unit instead of two makes control simpler, the structure more compact and a faster movement speed. The static model of the AFDF is developed to characterize the mapping laws between structural dimensions and actuator amplification ratios, and the dynamic model represents the relationship between the control signals and move displacements, thus demonstrating the feasibility of the actuator. Finally, a prototype was fabricated, and a testing system was set up to conduct performance evaluations of its motion capabilities. At the driving frequencies of 370 Hz and 380 Hz, the maximum forward and reverse motion speeds can reach 4.345mm/s and 4.537mm/s, respectively. In the range of 0.1–10 N, there is no significant change in motion speed, and it has good stability. Its resolution for forward and reverse motion can reach 106 nm and 109 nm, respectively.
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
