Ximing Zhao, Yilin Su, Qingzhang Xu, Haohang Liu, Rui Shi, Meiyang Zhang, Xuyan Hou, Youyu Wang
{"title":"具有可变刚度、形状感知和自加热功能的柔性连续机器人","authors":"Ximing Zhao, Yilin Su, Qingzhang Xu, Haohang Liu, Rui Shi, Meiyang Zhang, Xuyan Hou, Youyu Wang","doi":"10.1002/aisy.202400166","DOIUrl":null,"url":null,"abstract":"<p>Conventional continuum robots have outstanding flexibility and dexterity. However, when the robot needs to interact with the environment, the softness may affect the performance of the robot. Especially in transport tasks, the softness of continuum robots can lead to handling failures and drastic drops in precision. The variable stiffness continuum robot combines the advantages of flexibility and rigidity, which is conducive to expanding the application scenarios of flexible continuum robots. This article proposes a flexible continuum robot that simultaneously realizes variable stiffness, shape-aware, and self-heating functions using liquid metal. The low-temperature phase transition property of liquid metal is utilized to realize the variable stiffness function; the overall stiffness of the robot can reach the range of 18.5–183 N m<sup>−1</sup>, which can realize a tenfold stiffness gain. The conductivity of liquid metal is utilized to develop the shape-aware function, and the monitoring accuracy is within 5%. At the same time, this article utilizes the liquid metal's resistive thermal effect to realize heating function, so that the robot no longer needs heating systems such as heating wires and can realize the phase transition by energizing itself. Based on this design, the robot arm can realize the transition between maximum and minimum stiffness within 240 s.</p>","PeriodicalId":93858,"journal":{"name":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","volume":"6 11","pages":""},"PeriodicalIF":6.1000,"publicationDate":"2024-10-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202400166","citationCount":"0","resultStr":"{\"title\":\"Flexible Continuum Robot with Variable Stiffness, Shape-Aware, and Self-Heating Capabilities\",\"authors\":\"Ximing Zhao, Yilin Su, Qingzhang Xu, Haohang Liu, Rui Shi, Meiyang Zhang, Xuyan Hou, Youyu Wang\",\"doi\":\"10.1002/aisy.202400166\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Conventional continuum robots have outstanding flexibility and dexterity. However, when the robot needs to interact with the environment, the softness may affect the performance of the robot. Especially in transport tasks, the softness of continuum robots can lead to handling failures and drastic drops in precision. The variable stiffness continuum robot combines the advantages of flexibility and rigidity, which is conducive to expanding the application scenarios of flexible continuum robots. This article proposes a flexible continuum robot that simultaneously realizes variable stiffness, shape-aware, and self-heating functions using liquid metal. The low-temperature phase transition property of liquid metal is utilized to realize the variable stiffness function; the overall stiffness of the robot can reach the range of 18.5–183 N m<sup>−1</sup>, which can realize a tenfold stiffness gain. The conductivity of liquid metal is utilized to develop the shape-aware function, and the monitoring accuracy is within 5%. At the same time, this article utilizes the liquid metal's resistive thermal effect to realize heating function, so that the robot no longer needs heating systems such as heating wires and can realize the phase transition by energizing itself. Based on this design, the robot arm can realize the transition between maximum and minimum stiffness within 240 s.</p>\",\"PeriodicalId\":93858,\"journal\":{\"name\":\"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)\",\"volume\":\"6 11\",\"pages\":\"\"},\"PeriodicalIF\":6.1000,\"publicationDate\":\"2024-10-28\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202400166\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://advanced.onlinelibrary.wiley.com/doi/10.1002/aisy.202400166\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","FirstCategoryId":"1085","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/aisy.202400166","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
摘要
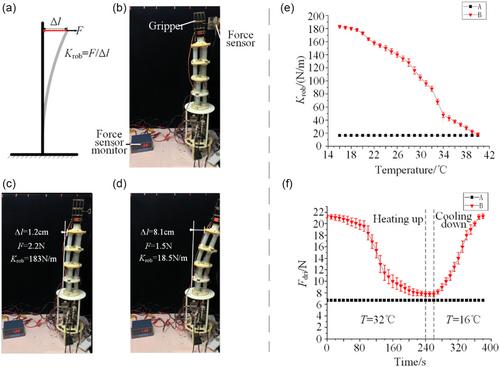
传统的连续机器人具有出色的灵活性和灵巧性。然而,当机器人需要与环境交互时,柔软度可能会影响机器人的性能。特别是在运输任务中,连续体机器人的柔软度可能会导致搬运失败和精度急剧下降。变刚度连续机器人兼具柔性和刚性的优点,有利于拓展柔性连续机器人的应用场景。本文提出了一种利用液态金属同时实现变刚度、形状感知和自加热功能的柔性连续机器人。利用液态金属的低温相变特性实现变刚度功能,机器人的整体刚度可达 18.5-183 N m-1,可实现十倍的刚度增益。利用液态金属的导电性开发了形状感知功能,监测精度在 5%以内。同时,本文利用液态金属的电阻热效应实现加热功能,使机器人不再需要加热丝等加热系统,通过自身通电即可实现相变。基于这种设计,机器人手臂可在 240 秒内实现最大刚度和最小刚度之间的转换。
Flexible Continuum Robot with Variable Stiffness, Shape-Aware, and Self-Heating Capabilities
Conventional continuum robots have outstanding flexibility and dexterity. However, when the robot needs to interact with the environment, the softness may affect the performance of the robot. Especially in transport tasks, the softness of continuum robots can lead to handling failures and drastic drops in precision. The variable stiffness continuum robot combines the advantages of flexibility and rigidity, which is conducive to expanding the application scenarios of flexible continuum robots. This article proposes a flexible continuum robot that simultaneously realizes variable stiffness, shape-aware, and self-heating functions using liquid metal. The low-temperature phase transition property of liquid metal is utilized to realize the variable stiffness function; the overall stiffness of the robot can reach the range of 18.5–183 N m−1, which can realize a tenfold stiffness gain. The conductivity of liquid metal is utilized to develop the shape-aware function, and the monitoring accuracy is within 5%. At the same time, this article utilizes the liquid metal's resistive thermal effect to realize heating function, so that the robot no longer needs heating systems such as heating wires and can realize the phase transition by energizing itself. Based on this design, the robot arm can realize the transition between maximum and minimum stiffness within 240 s.




 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
