Shakra Mehak, Inês F Ramos, Keerthi Sagar, Aswin Ramasubramanian, John D Kelleher, Michael Guilfoyle, Gabriele Gianini, Ernesto Damiani, Maria Chiara Leva
{"title":"通过人机应用中的协作智能标准提高数据质量的路线图。","authors":"Shakra Mehak, Inês F Ramos, Keerthi Sagar, Aswin Ramasubramanian, John D Kelleher, Michael Guilfoyle, Gabriele Gianini, Ernesto Damiani, Maria Chiara Leva","doi":"10.3389/frobt.2024.1434351","DOIUrl":null,"url":null,"abstract":"<p><p>Collaborative intelligence (CI) involves human-machine interactions and is deemed safety-critical because their reliable interactions are crucial in preventing severe injuries and environmental damage. As these applications become increasingly data-driven, the reliability of CI applications depends on the quality of data, shaping the system's ability to interpret and respond in diverse and often unpredictable environments. In this regard, it is important to adhere to data quality standards and guidelines, thus facilitating the advancement of these collaborative systems in industry. This study presents the challenges of data quality in CI applications within industrial environments, with two use cases that focus on the collection of data in Human-Robot Interaction (HRI). The first use case involves a framework for quantifying human and robot performance within the context of naturalistic robot learning, wherein humans teach robots using intuitive programming methods within the domain of HRI. The second use case presents real-time user state monitoring for adaptive multi-modal teleoperation, that allows for a dynamic adaptation of the system's interface, interaction modality and automation level based on user needs. The article proposes a hybrid standardization derived from established data quality-related ISO standards and addresses the unique challenges associated with multi-modal HRI data acquisition. The use cases presented in this study were carried out as part of an EU-funded project, Collaborative Intelligence for Safety-Critical Systems (CISC).</p>","PeriodicalId":47597,"journal":{"name":"Frontiers in Robotics and AI","volume":"11 ","pages":"1434351"},"PeriodicalIF":3.0000,"publicationDate":"2024-12-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11669550/pdf/","citationCount":"0","resultStr":"{\"title\":\"A roadmap for improving data quality through standards for collaborative intelligence in human-robot applications.\",\"authors\":\"Shakra Mehak, Inês F Ramos, Keerthi Sagar, Aswin Ramasubramanian, John D Kelleher, Michael Guilfoyle, Gabriele Gianini, Ernesto Damiani, Maria Chiara Leva\",\"doi\":\"10.3389/frobt.2024.1434351\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Collaborative intelligence (CI) involves human-machine interactions and is deemed safety-critical because their reliable interactions are crucial in preventing severe injuries and environmental damage. As these applications become increasingly data-driven, the reliability of CI applications depends on the quality of data, shaping the system's ability to interpret and respond in diverse and often unpredictable environments. In this regard, it is important to adhere to data quality standards and guidelines, thus facilitating the advancement of these collaborative systems in industry. This study presents the challenges of data quality in CI applications within industrial environments, with two use cases that focus on the collection of data in Human-Robot Interaction (HRI). The first use case involves a framework for quantifying human and robot performance within the context of naturalistic robot learning, wherein humans teach robots using intuitive programming methods within the domain of HRI. The second use case presents real-time user state monitoring for adaptive multi-modal teleoperation, that allows for a dynamic adaptation of the system's interface, interaction modality and automation level based on user needs. The article proposes a hybrid standardization derived from established data quality-related ISO standards and addresses the unique challenges associated with multi-modal HRI data acquisition. The use cases presented in this study were carried out as part of an EU-funded project, Collaborative Intelligence for Safety-Critical Systems (CISC).</p>\",\"PeriodicalId\":47597,\"journal\":{\"name\":\"Frontiers in Robotics and AI\",\"volume\":\"11 \",\"pages\":\"1434351\"},\"PeriodicalIF\":3.0000,\"publicationDate\":\"2024-12-12\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11669550/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Robotics and AI\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.3389/frobt.2024.1434351\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q2\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Robotics and AI","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/frobt.2024.1434351","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
A roadmap for improving data quality through standards for collaborative intelligence in human-robot applications.
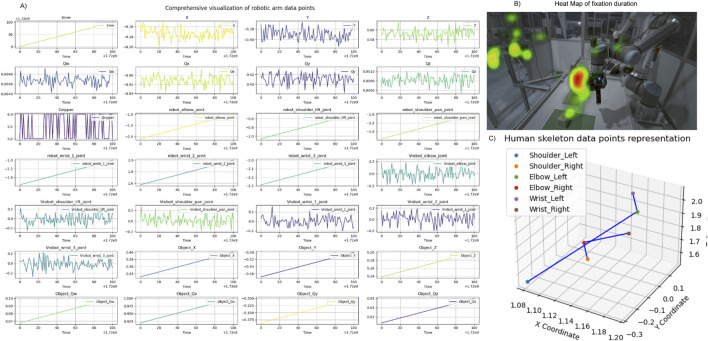
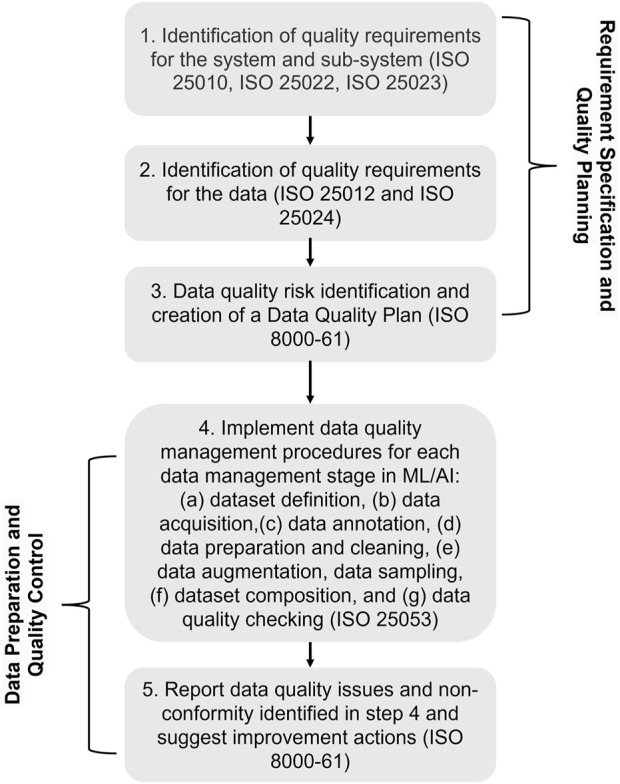
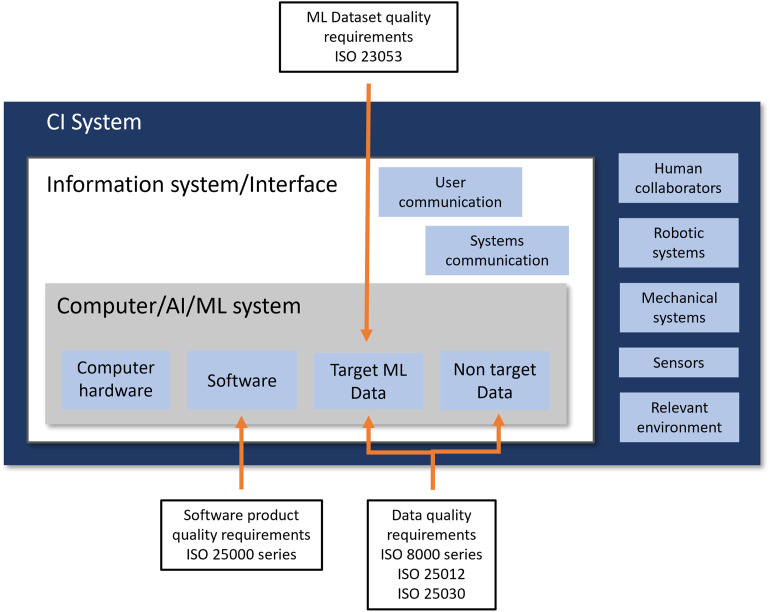
Collaborative intelligence (CI) involves human-machine interactions and is deemed safety-critical because their reliable interactions are crucial in preventing severe injuries and environmental damage. As these applications become increasingly data-driven, the reliability of CI applications depends on the quality of data, shaping the system's ability to interpret and respond in diverse and often unpredictable environments. In this regard, it is important to adhere to data quality standards and guidelines, thus facilitating the advancement of these collaborative systems in industry. This study presents the challenges of data quality in CI applications within industrial environments, with two use cases that focus on the collection of data in Human-Robot Interaction (HRI). The first use case involves a framework for quantifying human and robot performance within the context of naturalistic robot learning, wherein humans teach robots using intuitive programming methods within the domain of HRI. The second use case presents real-time user state monitoring for adaptive multi-modal teleoperation, that allows for a dynamic adaptation of the system's interface, interaction modality and automation level based on user needs. The article proposes a hybrid standardization derived from established data quality-related ISO standards and addresses the unique challenges associated with multi-modal HRI data acquisition. The use cases presented in this study were carried out as part of an EU-funded project, Collaborative Intelligence for Safety-Critical Systems (CISC).
期刊介绍:
Frontiers in Robotics and AI publishes rigorously peer-reviewed research covering all theory and applications of robotics, technology, and artificial intelligence, from biomedical to space robotics.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
