Jonathan Vogl, Charles D McCurry, Sharon Bommer, J Andrew Atchley
{"title":"美国陆军航空医学研究实验室多属性任务电池。","authors":"Jonathan Vogl, Charles D McCurry, Sharon Bommer, J Andrew Atchley","doi":"10.3389/fnrgo.2024.1435588","DOIUrl":null,"url":null,"abstract":"<p><p>The U.S. Army Aeromedical Research Laboratory (USAARL) Multi-Attribute Task Battery (MATB) represents a significant advancement in research platforms for human performance assessment and automation studies. The USAARL MATB builds upon the legacy of the traditional MATB, which has been refined over 30 years of use to include four primary aviation-like tasks. However, the USAARL MATB takes this foundation and enhances it to meet the demands of contemporary research, particularly in the areas of performance modeling, cognitive workload assessment, adaptive automation, and trust in automation. The USAARL MATB retains the four classic subtask types from its predecessors while introducing innovations such as subtask variations, dynamic demand transitions, and performance-driven adaptive automation handoffs. This paper introduces the USAARL MATB to the research community, highlighting its development history, key features, and potential applications.</p>","PeriodicalId":517413,"journal":{"name":"Frontiers in neuroergonomics","volume":"5 ","pages":"1435588"},"PeriodicalIF":1.9000,"publicationDate":"2024-12-18","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11688364/pdf/","citationCount":"0","resultStr":"{\"title\":\"The United States Army Aeromedical Research Laboratory Multi-Attribute Task Battery.\",\"authors\":\"Jonathan Vogl, Charles D McCurry, Sharon Bommer, J Andrew Atchley\",\"doi\":\"10.3389/fnrgo.2024.1435588\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>The U.S. Army Aeromedical Research Laboratory (USAARL) Multi-Attribute Task Battery (MATB) represents a significant advancement in research platforms for human performance assessment and automation studies. The USAARL MATB builds upon the legacy of the traditional MATB, which has been refined over 30 years of use to include four primary aviation-like tasks. However, the USAARL MATB takes this foundation and enhances it to meet the demands of contemporary research, particularly in the areas of performance modeling, cognitive workload assessment, adaptive automation, and trust in automation. The USAARL MATB retains the four classic subtask types from its predecessors while introducing innovations such as subtask variations, dynamic demand transitions, and performance-driven adaptive automation handoffs. This paper introduces the USAARL MATB to the research community, highlighting its development history, key features, and potential applications.</p>\",\"PeriodicalId\":517413,\"journal\":{\"name\":\"Frontiers in neuroergonomics\",\"volume\":\"5 \",\"pages\":\"1435588\"},\"PeriodicalIF\":1.9000,\"publicationDate\":\"2024-12-18\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11688364/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in neuroergonomics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.3389/fnrgo.2024.1435588\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"ERGONOMICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in neuroergonomics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/fnrgo.2024.1435588","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"ERGONOMICS","Score":null,"Total":0}
The United States Army Aeromedical Research Laboratory Multi-Attribute Task Battery.
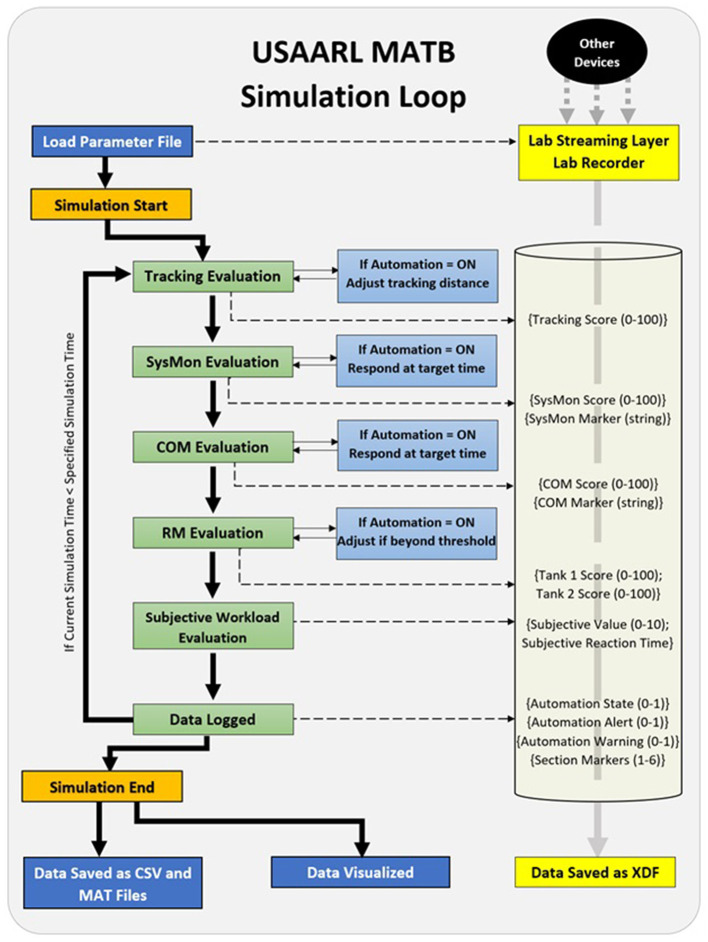
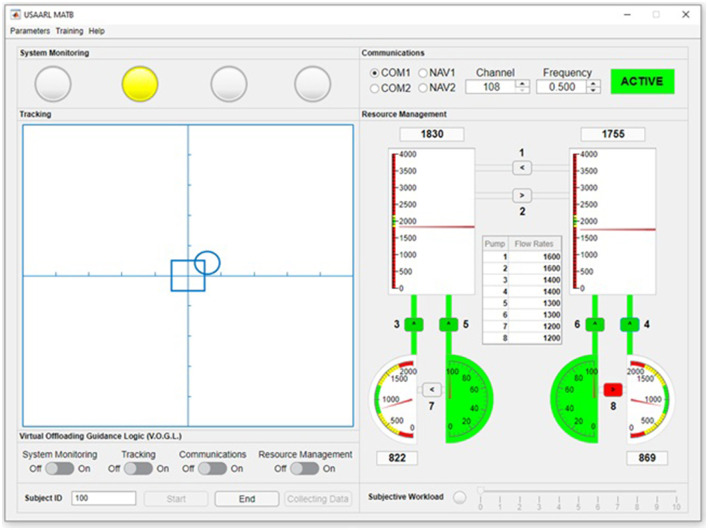
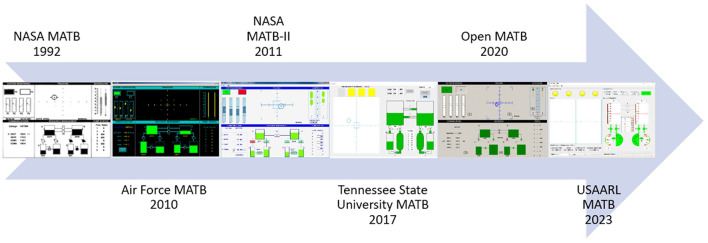
The U.S. Army Aeromedical Research Laboratory (USAARL) Multi-Attribute Task Battery (MATB) represents a significant advancement in research platforms for human performance assessment and automation studies. The USAARL MATB builds upon the legacy of the traditional MATB, which has been refined over 30 years of use to include four primary aviation-like tasks. However, the USAARL MATB takes this foundation and enhances it to meet the demands of contemporary research, particularly in the areas of performance modeling, cognitive workload assessment, adaptive automation, and trust in automation. The USAARL MATB retains the four classic subtask types from its predecessors while introducing innovations such as subtask variations, dynamic demand transitions, and performance-driven adaptive automation handoffs. This paper introduces the USAARL MATB to the research community, highlighting its development history, key features, and potential applications.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
