{"title":"基于质心坐标的高效目标定位与误差分析。","authors":"Andrea Bodonyi, Roland Kunkli","doi":"10.1186/s42492-020-00052-y","DOIUrl":null,"url":null,"abstract":"<p><p>In this paper, we propose an efficient computational method for converting local coordinates to world coordinates using specially structured coordinate data. The problem in question is the computation of world coordinates of an object throughout a motion, assuming that we only know the changing coordinates of some fixed surrounding reference points in the local coordinate system of the object. The proposed method is based on barycentric coordinates; by taking the aforementioned static positions as the vertices of a polyhedron, we can specify the coordinates of the object in each step with the help of barycentric coordinates. This approach can significantly help us to achieve more accurate results than by using other possible methods. In the paper, we describe the problem and barycentric coordinate-based solution in detail. We then compare the barycentric method with a technique based on transformation matrices, which we also tested for solving our problem. We also present various diagrams that demonstrate the efficiency of our proposed approach in terms of precision and performance.</p>","PeriodicalId":52384,"journal":{"name":"Visual Computing for Industry, Biomedicine, and Art","volume":"3 1","pages":"18"},"PeriodicalIF":6.0000,"publicationDate":"2020-07-31","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1186/s42492-020-00052-y","citationCount":"4","resultStr":"{\"title\":\"Efficient object location determination and error analysis based on barycentric coordinates.\",\"authors\":\"Andrea Bodonyi, Roland Kunkli\",\"doi\":\"10.1186/s42492-020-00052-y\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>In this paper, we propose an efficient computational method for converting local coordinates to world coordinates using specially structured coordinate data. The problem in question is the computation of world coordinates of an object throughout a motion, assuming that we only know the changing coordinates of some fixed surrounding reference points in the local coordinate system of the object. The proposed method is based on barycentric coordinates; by taking the aforementioned static positions as the vertices of a polyhedron, we can specify the coordinates of the object in each step with the help of barycentric coordinates. This approach can significantly help us to achieve more accurate results than by using other possible methods. In the paper, we describe the problem and barycentric coordinate-based solution in detail. We then compare the barycentric method with a technique based on transformation matrices, which we also tested for solving our problem. We also present various diagrams that demonstrate the efficiency of our proposed approach in terms of precision and performance.</p>\",\"PeriodicalId\":52384,\"journal\":{\"name\":\"Visual Computing for Industry, Biomedicine, and Art\",\"volume\":\"3 1\",\"pages\":\"18\"},\"PeriodicalIF\":6.0000,\"publicationDate\":\"2020-07-31\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.1186/s42492-020-00052-y\",\"citationCount\":\"4\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Visual Computing for Industry, Biomedicine, and Art\",\"FirstCategoryId\":\"1093\",\"ListUrlMain\":\"https://doi.org/10.1186/s42492-020-00052-y\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"Arts and Humanities\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Visual Computing for Industry, Biomedicine, and Art","FirstCategoryId":"1093","ListUrlMain":"https://doi.org/10.1186/s42492-020-00052-y","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"Arts and Humanities","Score":null,"Total":0}
Efficient object location determination and error analysis based on barycentric coordinates.
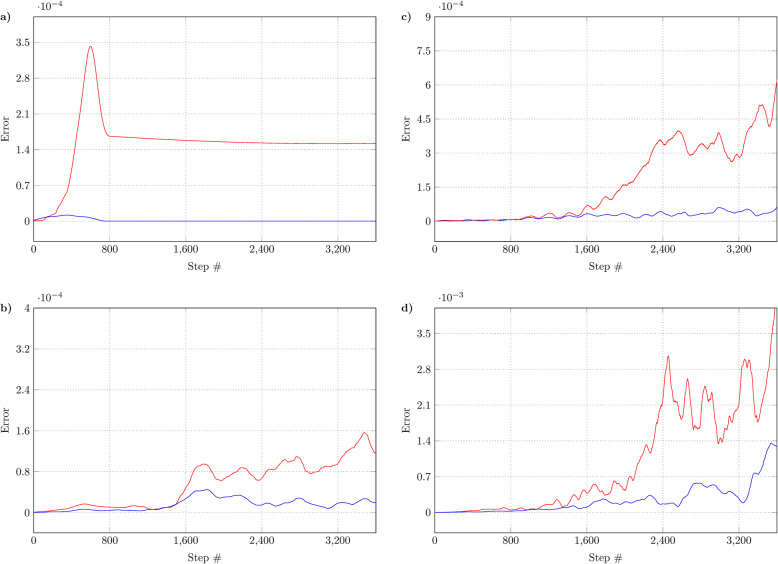
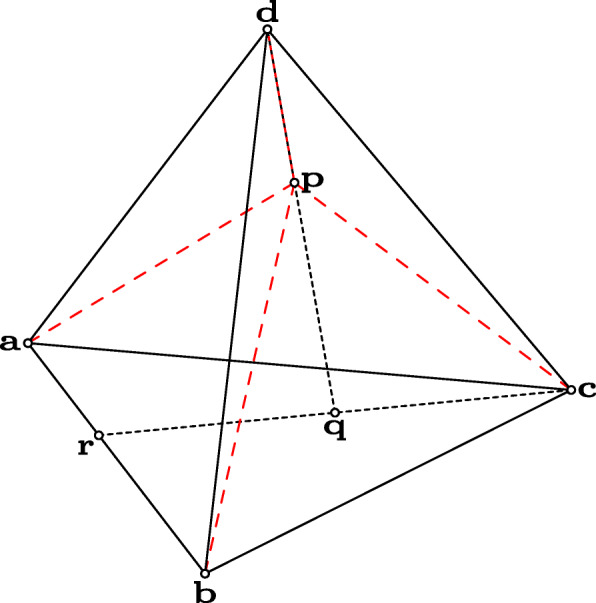
In this paper, we propose an efficient computational method for converting local coordinates to world coordinates using specially structured coordinate data. The problem in question is the computation of world coordinates of an object throughout a motion, assuming that we only know the changing coordinates of some fixed surrounding reference points in the local coordinate system of the object. The proposed method is based on barycentric coordinates; by taking the aforementioned static positions as the vertices of a polyhedron, we can specify the coordinates of the object in each step with the help of barycentric coordinates. This approach can significantly help us to achieve more accurate results than by using other possible methods. In the paper, we describe the problem and barycentric coordinate-based solution in detail. We then compare the barycentric method with a technique based on transformation matrices, which we also tested for solving our problem. We also present various diagrams that demonstrate the efficiency of our proposed approach in terms of precision and performance.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
