Salvador Pané, Pedro Wendel-Garcia, Yonca Belce, Xiang-Zhong Chen, Josep Puigmartí-Luis
{"title":"小型机器人系统的动力与制造。","authors":"Salvador Pané, Pedro Wendel-Garcia, Yonca Belce, Xiang-Zhong Chen, Josep Puigmartí-Luis","doi":"10.1007/s43154-021-00066-1","DOIUrl":null,"url":null,"abstract":"<p><strong>Purpose of review: </strong>The increasing number of contributions in the field of small-scale robotics is significantly associated with the progress in material science and process engineering during the last half century. With the objective of integrating the most optimal materials for the propulsion of these motile micro- and nanosystems, several manufacturing strategies have been adopted or specifically developed. This brief review covers some recent advances in materials and fabrication of small-scale robots with a focus on the materials serving as components for their motion and actuation.</p><p><strong>Recent findings: </strong>Integration of a wealth of materials is now possible in several micro- and nanorobotic designs owing to the advances in micro- and nanofabrication and chemical synthesis. Regarding light-driven swimmers, novel photocatalytic materials and deformable liquid crystal elastomers have been recently reported. Acoustic swimmers are also gaining attention, with several prominent examples of acoustic bubble-based 3D swimmers being recently reported. Magnetic micro- and nanorobots are increasingly investigated for their prospective use in biomedical applications. The adoption of different materials and novel fabrication strategies based on 3D printing, template-assisted electrodeposition, or electrospinning is briefly discussed.</p><p><strong>Summary: </strong>A brief review on fabrication and powering of small-scale robotics is presented. First, a concise introduction to the world of small-scale robotics and their propulsion by means of magnetic fields, ultrasound, and light is provided. Recent examples of materials and fabrication methodologies for the realization of these devices follow thereafter.</p>","PeriodicalId":93426,"journal":{"name":"Current robotics reports","volume":"2 4","pages":"427-440"},"PeriodicalIF":0.0000,"publicationDate":"2021-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC8721937/pdf/","citationCount":"6","resultStr":"{\"title\":\"Powering and Fabrication of Small-Scale Robotics Systems.\",\"authors\":\"Salvador Pané, Pedro Wendel-Garcia, Yonca Belce, Xiang-Zhong Chen, Josep Puigmartí-Luis\",\"doi\":\"10.1007/s43154-021-00066-1\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Purpose of review: </strong>The increasing number of contributions in the field of small-scale robotics is significantly associated with the progress in material science and process engineering during the last half century. With the objective of integrating the most optimal materials for the propulsion of these motile micro- and nanosystems, several manufacturing strategies have been adopted or specifically developed. This brief review covers some recent advances in materials and fabrication of small-scale robots with a focus on the materials serving as components for their motion and actuation.</p><p><strong>Recent findings: </strong>Integration of a wealth of materials is now possible in several micro- and nanorobotic designs owing to the advances in micro- and nanofabrication and chemical synthesis. Regarding light-driven swimmers, novel photocatalytic materials and deformable liquid crystal elastomers have been recently reported. Acoustic swimmers are also gaining attention, with several prominent examples of acoustic bubble-based 3D swimmers being recently reported. Magnetic micro- and nanorobots are increasingly investigated for their prospective use in biomedical applications. The adoption of different materials and novel fabrication strategies based on 3D printing, template-assisted electrodeposition, or electrospinning is briefly discussed.</p><p><strong>Summary: </strong>A brief review on fabrication and powering of small-scale robotics is presented. First, a concise introduction to the world of small-scale robotics and their propulsion by means of magnetic fields, ultrasound, and light is provided. Recent examples of materials and fabrication methodologies for the realization of these devices follow thereafter.</p>\",\"PeriodicalId\":93426,\"journal\":{\"name\":\"Current robotics reports\",\"volume\":\"2 4\",\"pages\":\"427-440\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2021-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC8721937/pdf/\",\"citationCount\":\"6\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Current robotics reports\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s43154-021-00066-1\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2021/10/7 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Current robotics reports","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s43154-021-00066-1","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2021/10/7 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
Powering and Fabrication of Small-Scale Robotics Systems.
Purpose of review: The increasing number of contributions in the field of small-scale robotics is significantly associated with the progress in material science and process engineering during the last half century. With the objective of integrating the most optimal materials for the propulsion of these motile micro- and nanosystems, several manufacturing strategies have been adopted or specifically developed. This brief review covers some recent advances in materials and fabrication of small-scale robots with a focus on the materials serving as components for their motion and actuation.
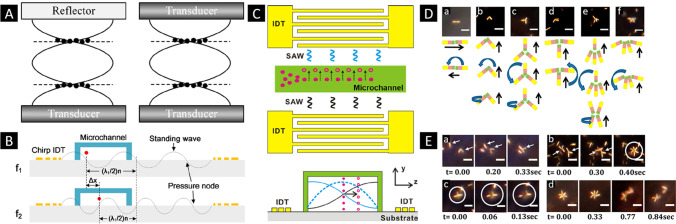
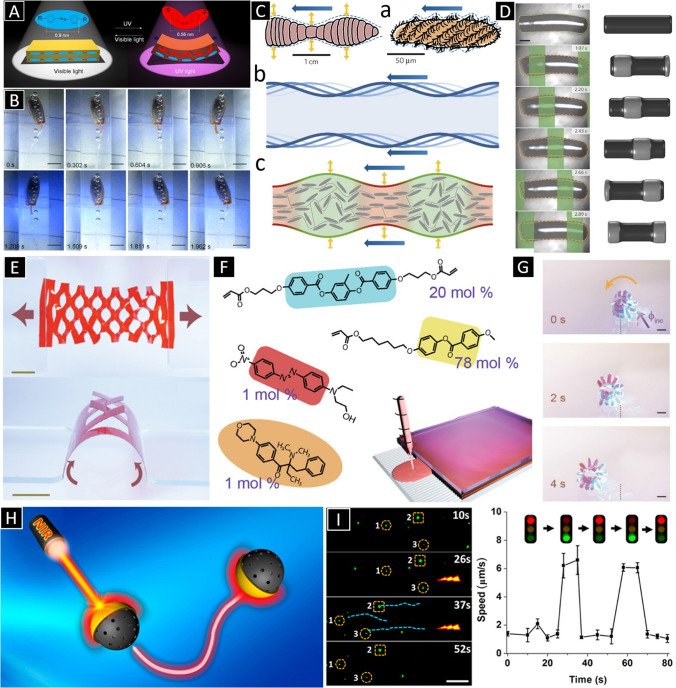
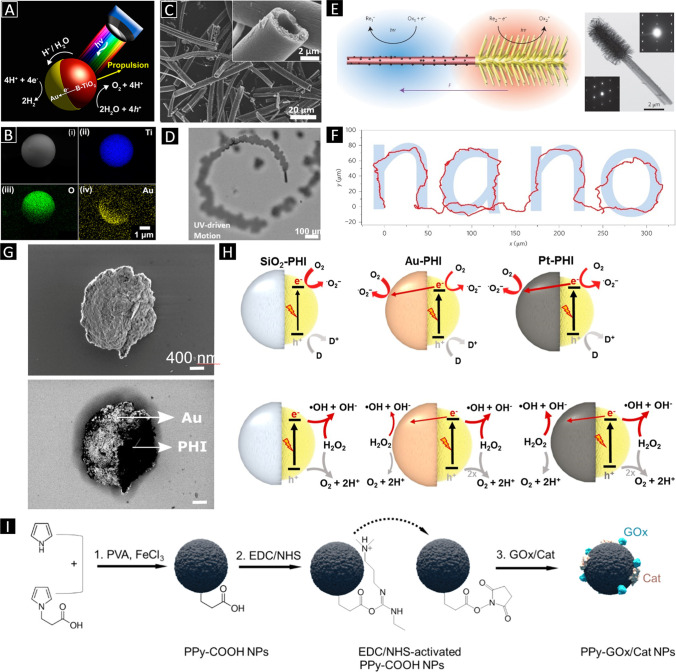
Recent findings: Integration of a wealth of materials is now possible in several micro- and nanorobotic designs owing to the advances in micro- and nanofabrication and chemical synthesis. Regarding light-driven swimmers, novel photocatalytic materials and deformable liquid crystal elastomers have been recently reported. Acoustic swimmers are also gaining attention, with several prominent examples of acoustic bubble-based 3D swimmers being recently reported. Magnetic micro- and nanorobots are increasingly investigated for their prospective use in biomedical applications. The adoption of different materials and novel fabrication strategies based on 3D printing, template-assisted electrodeposition, or electrospinning is briefly discussed.
Summary: A brief review on fabrication and powering of small-scale robotics is presented. First, a concise introduction to the world of small-scale robotics and their propulsion by means of magnetic fields, ultrasound, and light is provided. Recent examples of materials and fabrication methodologies for the realization of these devices follow thereafter.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
