{"title":"机器人导航治疗钩骨骨折技术要点。","authors":"Fang Jie, Zhu Hui, Zheng Dawei, Qi Weiya","doi":"10.5152/j.aott.2022.21310","DOIUrl":null,"url":null,"abstract":"<p><strong>Objective: </strong>The aim of this study was to demonstrate a new robotic technique for the fixation of the fracture of the hook of hamate.</p><p><strong>Methods: </strong>In this retrospective study, six patients who had undergone treatment of the hook of hamate fracture with a new technique using robot navigation were included. Patients were evaluated postoperatively with flexion - extension and radial-ulnar range of wrist motion, and were measured using a goniometer. Grip strength and pinch strength were measured and compared with the contralateral wrist at the final follow-up. The Visual Analog Scale (VAS) and the Mayo Wrist Score were used to evaluate and record the recovery outcome of the wrist.</p><p><strong>Results: </strong>Primarily, healing was achieved at 12.3 weeks postoperatively. At the final follow-up (5-22 months, average 13.1 months) the VAS score of the wrist was an average of 0.3 (0-2); the mean radial-ulnar deviation was 64.7°; the average of the flexion and extension range of motion was 141.9°; the average grip strength was 40.9 Kg; the average pinch strength was 11.8 Kg and the average Mayo Wrist Score was 95.8.</p><p><strong>Conclusion: </strong>This study has shown us that treatment of nondisplaced or minimal displaced fractures of the hook of the hamate with robot navigation is a viable technique with satisfactory clinical and radiological results.</p>","PeriodicalId":7097,"journal":{"name":"Acta orthopaedica et traumatologica turcica","volume":"56 4","pages":"296-299"},"PeriodicalIF":1.1000,"publicationDate":"2022-07-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/aa/63/aott-56-4-296.PMC9612663.pdf","citationCount":"1","resultStr":"{\"title\":\"Treatment of the hook of hamate fracture with robot navigation: A note on technique.\",\"authors\":\"Fang Jie, Zhu Hui, Zheng Dawei, Qi Weiya\",\"doi\":\"10.5152/j.aott.2022.21310\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Objective: </strong>The aim of this study was to demonstrate a new robotic technique for the fixation of the fracture of the hook of hamate.</p><p><strong>Methods: </strong>In this retrospective study, six patients who had undergone treatment of the hook of hamate fracture with a new technique using robot navigation were included. Patients were evaluated postoperatively with flexion - extension and radial-ulnar range of wrist motion, and were measured using a goniometer. Grip strength and pinch strength were measured and compared with the contralateral wrist at the final follow-up. The Visual Analog Scale (VAS) and the Mayo Wrist Score were used to evaluate and record the recovery outcome of the wrist.</p><p><strong>Results: </strong>Primarily, healing was achieved at 12.3 weeks postoperatively. At the final follow-up (5-22 months, average 13.1 months) the VAS score of the wrist was an average of 0.3 (0-2); the mean radial-ulnar deviation was 64.7°; the average of the flexion and extension range of motion was 141.9°; the average grip strength was 40.9 Kg; the average pinch strength was 11.8 Kg and the average Mayo Wrist Score was 95.8.</p><p><strong>Conclusion: </strong>This study has shown us that treatment of nondisplaced or minimal displaced fractures of the hook of the hamate with robot navigation is a viable technique with satisfactory clinical and radiological results.</p>\",\"PeriodicalId\":7097,\"journal\":{\"name\":\"Acta orthopaedica et traumatologica turcica\",\"volume\":\"56 4\",\"pages\":\"296-299\"},\"PeriodicalIF\":1.1000,\"publicationDate\":\"2022-07-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/aa/63/aott-56-4-296.PMC9612663.pdf\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Acta orthopaedica et traumatologica turcica\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://doi.org/10.5152/j.aott.2022.21310\",\"RegionNum\":4,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ORTHOPEDICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Acta orthopaedica et traumatologica turcica","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.5152/j.aott.2022.21310","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ORTHOPEDICS","Score":null,"Total":0}
Treatment of the hook of hamate fracture with robot navigation: A note on technique.
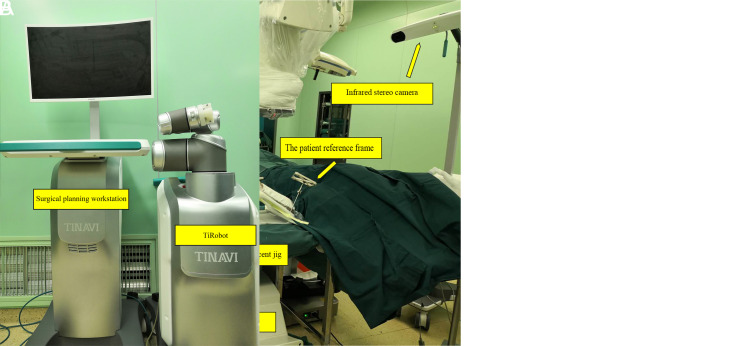
Objective: The aim of this study was to demonstrate a new robotic technique for the fixation of the fracture of the hook of hamate.
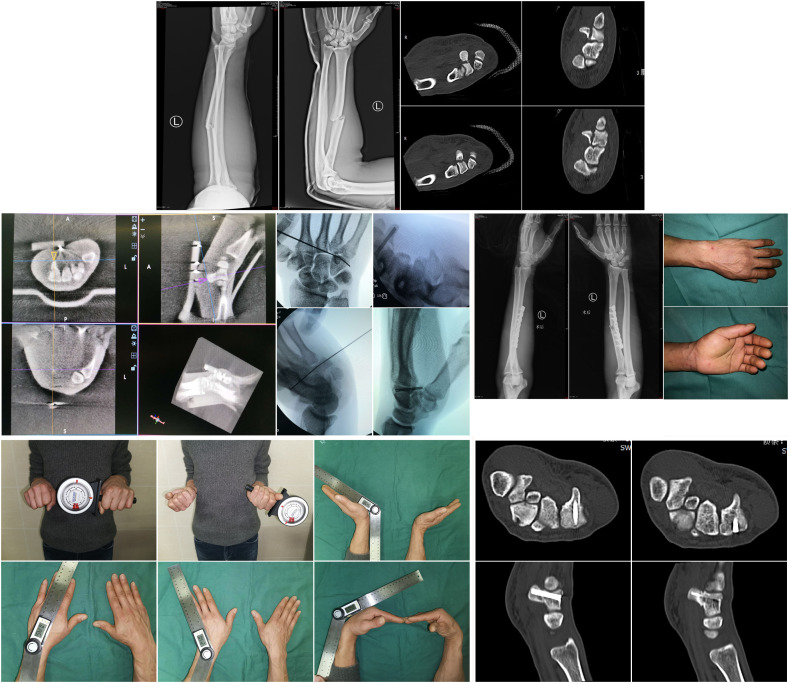
Methods: In this retrospective study, six patients who had undergone treatment of the hook of hamate fracture with a new technique using robot navigation were included. Patients were evaluated postoperatively with flexion - extension and radial-ulnar range of wrist motion, and were measured using a goniometer. Grip strength and pinch strength were measured and compared with the contralateral wrist at the final follow-up. The Visual Analog Scale (VAS) and the Mayo Wrist Score were used to evaluate and record the recovery outcome of the wrist.
Results: Primarily, healing was achieved at 12.3 weeks postoperatively. At the final follow-up (5-22 months, average 13.1 months) the VAS score of the wrist was an average of 0.3 (0-2); the mean radial-ulnar deviation was 64.7°; the average of the flexion and extension range of motion was 141.9°; the average grip strength was 40.9 Kg; the average pinch strength was 11.8 Kg and the average Mayo Wrist Score was 95.8.
Conclusion: This study has shown us that treatment of nondisplaced or minimal displaced fractures of the hook of the hamate with robot navigation is a viable technique with satisfactory clinical and radiological results.
期刊介绍:
Acta Orthopaedica et Traumatologica Turcica (AOTT) is an international, scientific, open access periodical published in accordance with independent, unbiased, and double-blinded peer-review principles. The journal is the official publication of the Turkish Association of Orthopaedics and Traumatology, and Turkish Society of Orthopaedics and Traumatology. It is published bimonthly in January, March, May, July, September, and November. The publication language of the journal is English.
The aim of the journal is to publish original studies of the highest scientific and clinical value in orthopedics, traumatology, and related disciplines. The scope of the journal includes but not limited to diagnostic, treatment, and prevention methods related to orthopedics and traumatology. Acta Orthopaedica et Traumatologica Turcica publishes clinical and basic research articles, case reports, personal clinical and technical notes, systematic reviews and meta-analyses and letters to the Editor. Proceedings of scientific meetings are also considered for publication.
The target audience of the journal includes healthcare professionals, physicians, and researchers who are interested or working in orthopedics and traumatology field, and related disciplines.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
