Wen Zhang, Zhonghua Miao, Nan Li, Chuangxin He, Teng Sun
{"title":"当前杂草精准管理机器人方法回顾。","authors":"Wen Zhang, Zhonghua Miao, Nan Li, Chuangxin He, Teng Sun","doi":"10.1007/s43154-022-00086-5","DOIUrl":null,"url":null,"abstract":"<p><strong>Purpose of review: </strong>The goal of this review is to provide an overview of current robotic approaches to precision weed management. This includes an investigation into applications within this field during the past 5 years, identifying which major technical areas currently preclude more widespread use, and which key topics will drive future development and utilisation.</p><p><strong>Recent findings: </strong>Studies combining computer vision with traditional machine learning and deep learning are driving progress in weed detection and robotic approaches to mechanical weeding. Integrating key technologies for perception, decision-making, and control, autonomous weeding robots are emerging quickly. These effectively save effort while reducing environmental pollution caused by pesticide use.</p><p><strong>Summary: </strong>This review assesses different weed detection methods and weeder robots used in precision weed management and summarises the trends in this area in recent years. The limitations of current systems are discussed, and ideas for future research directions are proposed.</p>","PeriodicalId":93426,"journal":{"name":"Current robotics reports","volume":" ","pages":"139-151"},"PeriodicalIF":0.0000,"publicationDate":"2022-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC9305686/pdf/","citationCount":"0","resultStr":"{\"title\":\"Review of Current Robotic Approaches for Precision Weed Management.\",\"authors\":\"Wen Zhang, Zhonghua Miao, Nan Li, Chuangxin He, Teng Sun\",\"doi\":\"10.1007/s43154-022-00086-5\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Purpose of review: </strong>The goal of this review is to provide an overview of current robotic approaches to precision weed management. This includes an investigation into applications within this field during the past 5 years, identifying which major technical areas currently preclude more widespread use, and which key topics will drive future development and utilisation.</p><p><strong>Recent findings: </strong>Studies combining computer vision with traditional machine learning and deep learning are driving progress in weed detection and robotic approaches to mechanical weeding. Integrating key technologies for perception, decision-making, and control, autonomous weeding robots are emerging quickly. These effectively save effort while reducing environmental pollution caused by pesticide use.</p><p><strong>Summary: </strong>This review assesses different weed detection methods and weeder robots used in precision weed management and summarises the trends in this area in recent years. The limitations of current systems are discussed, and ideas for future research directions are proposed.</p>\",\"PeriodicalId\":93426,\"journal\":{\"name\":\"Current robotics reports\",\"volume\":\" \",\"pages\":\"139-151\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2022-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC9305686/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Current robotics reports\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s43154-022-00086-5\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2022/7/22 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Current robotics reports","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s43154-022-00086-5","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2022/7/22 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
Review of Current Robotic Approaches for Precision Weed Management.
Purpose of review: The goal of this review is to provide an overview of current robotic approaches to precision weed management. This includes an investigation into applications within this field during the past 5 years, identifying which major technical areas currently preclude more widespread use, and which key topics will drive future development and utilisation.
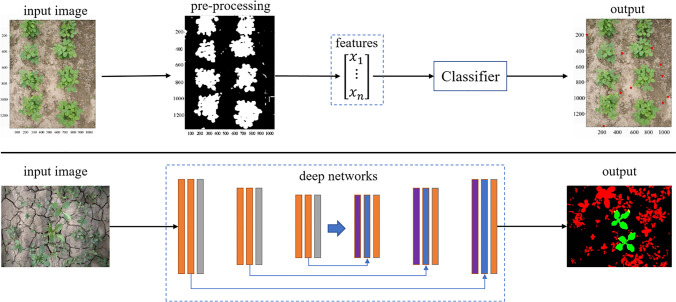
Recent findings: Studies combining computer vision with traditional machine learning and deep learning are driving progress in weed detection and robotic approaches to mechanical weeding. Integrating key technologies for perception, decision-making, and control, autonomous weeding robots are emerging quickly. These effectively save effort while reducing environmental pollution caused by pesticide use.
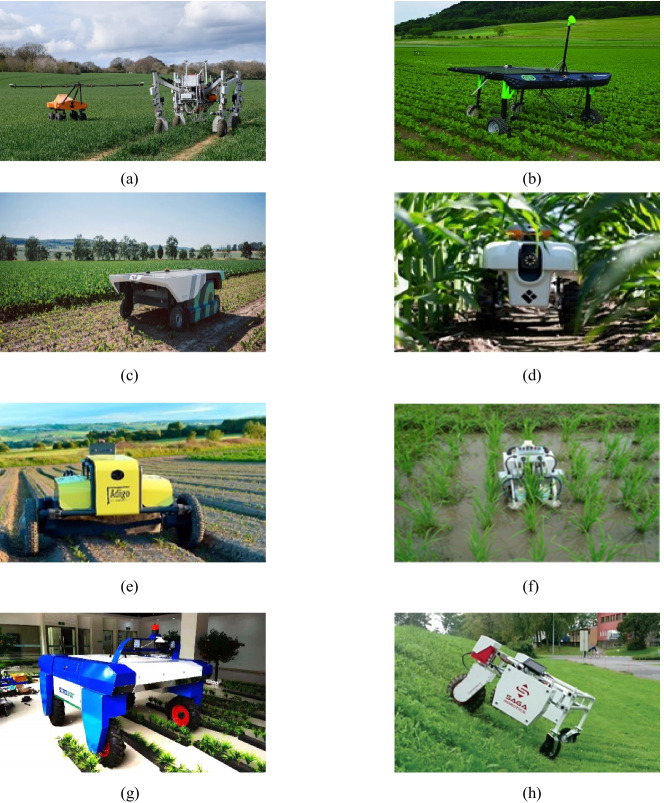
Summary: This review assesses different weed detection methods and weeder robots used in precision weed management and summarises the trends in this area in recent years. The limitations of current systems are discussed, and ideas for future research directions are proposed.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
