{"title":"开发一种可穿戴框架,用于评估现场基于机械的风险下降指标","authors":"H. Pillet , B. Watier","doi":"10.1016/j.irbm.2022.11.003","DOIUrl":null,"url":null,"abstract":"<div><h3>Objectives</h3><p>The characterization of the instability of gait is a current challenge of biomechanics. Indeed, risks of falling naturally result from the difficulty to control perturbations of the locomotion pattern. Hence, the assessment of a synthetic parameter able to quantify the instability in real time will be useful for the prevention of falls occurring in this context. Thus, the objective of the present study, in two steps, was to propose and evaluate a relevant parameter to quantify the risk of fallings.</p></div><div><h3>Material and Methods</h3><p>Experimental analysis of the gait of 11 able-bodied subjects from a motion capture system in laboratory condition was performed. The distance of the Body Center of Mass (BCOM) to the Minimal Moment Axis (MMA) was computed as a proxy of whole-body angular momentum<span> variations. In a second step, we quantified the kinematics during gait with wearable Inertial Measurement Units (IMU) fixed on two individuals (one able bodied person and one person with transfemoral amputation). We compared the IMU-based BCOM kinematics with a motion capture reference system to verify the accuracy of our measures in the field.</span></p></div><div><h3>Results</h3><p>Normative thresholds of the distance of the Body Center of Mass (BCOM) to the Minimal Moment Axis (MMA) during able-bodied level walking were assessed. The average error between the BCoM displacement computed from the IMU and from the reference vicon data of 4 mm, 3 mm and 53 mm on the mediolateral, anteroposterior and vertical axes respectively.</p></div><div><h3>Conclusion</h3><p>All these results make it possible to consider the determination of the risks of falls in the field at mid-term. the research on an optimal configuration that maintain the performance while simplifying the device will be essential to make it acceptable by the individuals.</p></div>","PeriodicalId":14605,"journal":{"name":"Irbm","volume":"44 2","pages":"Article 100742"},"PeriodicalIF":4.2000,"publicationDate":"2023-04-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Development of a Wearable Framework for the Assessment of a Mechanical-Based Indicator of Falling Risk in the Field\",\"authors\":\"H. Pillet , B. Watier\",\"doi\":\"10.1016/j.irbm.2022.11.003\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><h3>Objectives</h3><p>The characterization of the instability of gait is a current challenge of biomechanics. Indeed, risks of falling naturally result from the difficulty to control perturbations of the locomotion pattern. Hence, the assessment of a synthetic parameter able to quantify the instability in real time will be useful for the prevention of falls occurring in this context. Thus, the objective of the present study, in two steps, was to propose and evaluate a relevant parameter to quantify the risk of fallings.</p></div><div><h3>Material and Methods</h3><p>Experimental analysis of the gait of 11 able-bodied subjects from a motion capture system in laboratory condition was performed. The distance of the Body Center of Mass (BCOM) to the Minimal Moment Axis (MMA) was computed as a proxy of whole-body angular momentum<span> variations. In a second step, we quantified the kinematics during gait with wearable Inertial Measurement Units (IMU) fixed on two individuals (one able bodied person and one person with transfemoral amputation). We compared the IMU-based BCOM kinematics with a motion capture reference system to verify the accuracy of our measures in the field.</span></p></div><div><h3>Results</h3><p>Normative thresholds of the distance of the Body Center of Mass (BCOM) to the Minimal Moment Axis (MMA) during able-bodied level walking were assessed. The average error between the BCoM displacement computed from the IMU and from the reference vicon data of 4 mm, 3 mm and 53 mm on the mediolateral, anteroposterior and vertical axes respectively.</p></div><div><h3>Conclusion</h3><p>All these results make it possible to consider the determination of the risks of falls in the field at mid-term. the research on an optimal configuration that maintain the performance while simplifying the device will be essential to make it acceptable by the individuals.</p></div>\",\"PeriodicalId\":14605,\"journal\":{\"name\":\"Irbm\",\"volume\":\"44 2\",\"pages\":\"Article 100742\"},\"PeriodicalIF\":4.2000,\"publicationDate\":\"2023-04-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Irbm\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S195903182200118X\",\"RegionNum\":4,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2022/11/9 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Irbm","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S195903182200118X","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2022/11/9 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
Development of a Wearable Framework for the Assessment of a Mechanical-Based Indicator of Falling Risk in the Field
Objectives
The characterization of the instability of gait is a current challenge of biomechanics. Indeed, risks of falling naturally result from the difficulty to control perturbations of the locomotion pattern. Hence, the assessment of a synthetic parameter able to quantify the instability in real time will be useful for the prevention of falls occurring in this context. Thus, the objective of the present study, in two steps, was to propose and evaluate a relevant parameter to quantify the risk of fallings.
Material and Methods
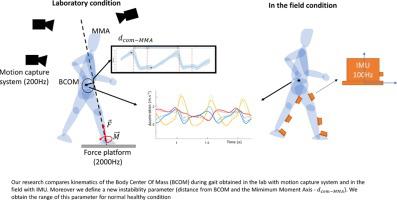
Experimental analysis of the gait of 11 able-bodied subjects from a motion capture system in laboratory condition was performed. The distance of the Body Center of Mass (BCOM) to the Minimal Moment Axis (MMA) was computed as a proxy of whole-body angular momentum variations. In a second step, we quantified the kinematics during gait with wearable Inertial Measurement Units (IMU) fixed on two individuals (one able bodied person and one person with transfemoral amputation). We compared the IMU-based BCOM kinematics with a motion capture reference system to verify the accuracy of our measures in the field.
Results
Normative thresholds of the distance of the Body Center of Mass (BCOM) to the Minimal Moment Axis (MMA) during able-bodied level walking were assessed. The average error between the BCoM displacement computed from the IMU and from the reference vicon data of 4 mm, 3 mm and 53 mm on the mediolateral, anteroposterior and vertical axes respectively.
Conclusion
All these results make it possible to consider the determination of the risks of falls in the field at mid-term. the research on an optimal configuration that maintain the performance while simplifying the device will be essential to make it acceptable by the individuals.
期刊介绍:
IRBM is the journal of the AGBM (Alliance for engineering in Biology an Medicine / Alliance pour le génie biologique et médical) and the SFGBM (BioMedical Engineering French Society / Société française de génie biologique médical) and the AFIB (French Association of Biomedical Engineers / Association française des ingénieurs biomédicaux).
As a vehicle of information and knowledge in the field of biomedical technologies, IRBM is devoted to fundamental as well as clinical research. Biomedical engineering and use of new technologies are the cornerstones of IRBM, providing authors and users with the latest information. Its six issues per year propose reviews (state-of-the-art and current knowledge), original articles directed at fundamental research and articles focusing on biomedical engineering. All articles are submitted to peer reviewers acting as guarantors for IRBM''s scientific and medical content. The field covered by IRBM includes all the discipline of Biomedical engineering. Thereby, the type of papers published include those that cover the technological and methodological development in:
-Physiological and Biological Signal processing (EEG, MEG, ECG…)-
Medical Image processing-
Biomechanics-
Biomaterials-
Medical Physics-
Biophysics-
Physiological and Biological Sensors-
Information technologies in healthcare-
Disability research-
Computational physiology-
…




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
