{"title":"气动下髋关节矫形器的控制策略","authors":"Ashmi M , Akhil VM","doi":"10.1016/j.irbm.2023.100791","DOIUrl":null,"url":null,"abstract":"<div><h3>Objectives</h3><p>The role of controllers is inevitable in the design of powered orthosis<span> to achieve ideal gait characteristics. Despite the fact that electrical actuators are preferred for most of the orthoses, a pneumatic actuator proves to have low cost and less weight. In this study, suitable controllers are designed and implemented for the knee and hip joints of a pneumatically actuated orthosis for the afflicted people.</span></p></div><div><h3>Material and Methods</h3><p>Different controllers (P, PI and PID) were tested for the position control of the orthosis by proper tuning of gain constants (<span><math><msub><mrow><mi>K</mi></mrow><mrow><mi>P</mi></mrow></msub></math></span>, <span><math><msub><mrow><mi>K</mi></mrow><mrow><mi>I</mi></mrow></msub></math></span>, <span><math><msub><mrow><mi>K</mi></mrow><mrow><mi>D</mi></mrow></msub></math></span><span><span>). By using Lagrange Euler Method, the optimal trajectory for the knee and hip joints were determined for the </span>pneumatic system<span>. Particle swarm optimization (PSO) based PID controller was further employed for optimizing the gain constants.</span></span></p></div><div><h3>Results</h3><p>With the healthy gait as reference, the knee and hip reference angles were manually set in the PID controller. The subject was made to walk five times at a distance of 5 m and the average knee and hip angles were calculated based on the gait trials. Knee and hip angles varied 0 to 45° and 0 to 35° for healthy subjects while they varied 0 to 41° and 0 to 45° for the implemented pneumatic leg. The values of gain constants obtained in manual tuning matched with the PSO based controller at 25<sup>th</sup> iteration and the best fitness function was chosen with least error (0.7011).</p></div><div><h3>Conclusion</h3><p><span>The prototype of the orthosis is fabricated and the response of PID controller was found to be acceptable for a desired pressure (5 bar) with an angular velocity of 3 deg/s. Using a PID controlled pneumatic orthosis, exhibited less oscillation and showed an improved steady-state error when compared to the other controllers, thereby replicating healthy gait. A global best position with minimum error was obtained using PSO to find optimal </span>controller gain constants.</p></div>","PeriodicalId":14605,"journal":{"name":"Irbm","volume":"44 5","pages":"Article 100791"},"PeriodicalIF":4.2000,"publicationDate":"2023-10-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A Control Strategy for Pneumatically Powered Below-Hip Orthosis\",\"authors\":\"Ashmi M , Akhil VM\",\"doi\":\"10.1016/j.irbm.2023.100791\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><h3>Objectives</h3><p>The role of controllers is inevitable in the design of powered orthosis<span> to achieve ideal gait characteristics. Despite the fact that electrical actuators are preferred for most of the orthoses, a pneumatic actuator proves to have low cost and less weight. In this study, suitable controllers are designed and implemented for the knee and hip joints of a pneumatically actuated orthosis for the afflicted people.</span></p></div><div><h3>Material and Methods</h3><p>Different controllers (P, PI and PID) were tested for the position control of the orthosis by proper tuning of gain constants (<span><math><msub><mrow><mi>K</mi></mrow><mrow><mi>P</mi></mrow></msub></math></span>, <span><math><msub><mrow><mi>K</mi></mrow><mrow><mi>I</mi></mrow></msub></math></span>, <span><math><msub><mrow><mi>K</mi></mrow><mrow><mi>D</mi></mrow></msub></math></span><span><span>). By using Lagrange Euler Method, the optimal trajectory for the knee and hip joints were determined for the </span>pneumatic system<span>. Particle swarm optimization (PSO) based PID controller was further employed for optimizing the gain constants.</span></span></p></div><div><h3>Results</h3><p>With the healthy gait as reference, the knee and hip reference angles were manually set in the PID controller. The subject was made to walk five times at a distance of 5 m and the average knee and hip angles were calculated based on the gait trials. Knee and hip angles varied 0 to 45° and 0 to 35° for healthy subjects while they varied 0 to 41° and 0 to 45° for the implemented pneumatic leg. The values of gain constants obtained in manual tuning matched with the PSO based controller at 25<sup>th</sup> iteration and the best fitness function was chosen with least error (0.7011).</p></div><div><h3>Conclusion</h3><p><span>The prototype of the orthosis is fabricated and the response of PID controller was found to be acceptable for a desired pressure (5 bar) with an angular velocity of 3 deg/s. Using a PID controlled pneumatic orthosis, exhibited less oscillation and showed an improved steady-state error when compared to the other controllers, thereby replicating healthy gait. A global best position with minimum error was obtained using PSO to find optimal </span>controller gain constants.</p></div>\",\"PeriodicalId\":14605,\"journal\":{\"name\":\"Irbm\",\"volume\":\"44 5\",\"pages\":\"Article 100791\"},\"PeriodicalIF\":4.2000,\"publicationDate\":\"2023-10-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Irbm\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S1959031823000404\",\"RegionNum\":4,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Irbm","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S1959031823000404","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
A Control Strategy for Pneumatically Powered Below-Hip Orthosis
Objectives
The role of controllers is inevitable in the design of powered orthosis to achieve ideal gait characteristics. Despite the fact that electrical actuators are preferred for most of the orthoses, a pneumatic actuator proves to have low cost and less weight. In this study, suitable controllers are designed and implemented for the knee and hip joints of a pneumatically actuated orthosis for the afflicted people.
Material and Methods
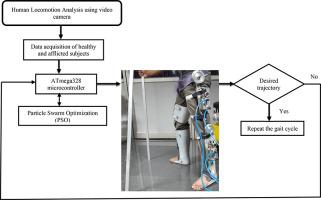
Different controllers (P, PI and PID) were tested for the position control of the orthosis by proper tuning of gain constants (, , ). By using Lagrange Euler Method, the optimal trajectory for the knee and hip joints were determined for the pneumatic system. Particle swarm optimization (PSO) based PID controller was further employed for optimizing the gain constants.
Results
With the healthy gait as reference, the knee and hip reference angles were manually set in the PID controller. The subject was made to walk five times at a distance of 5 m and the average knee and hip angles were calculated based on the gait trials. Knee and hip angles varied 0 to 45° and 0 to 35° for healthy subjects while they varied 0 to 41° and 0 to 45° for the implemented pneumatic leg. The values of gain constants obtained in manual tuning matched with the PSO based controller at 25th iteration and the best fitness function was chosen with least error (0.7011).
Conclusion
The prototype of the orthosis is fabricated and the response of PID controller was found to be acceptable for a desired pressure (5 bar) with an angular velocity of 3 deg/s. Using a PID controlled pneumatic orthosis, exhibited less oscillation and showed an improved steady-state error when compared to the other controllers, thereby replicating healthy gait. A global best position with minimum error was obtained using PSO to find optimal controller gain constants.
期刊介绍:
IRBM is the journal of the AGBM (Alliance for engineering in Biology an Medicine / Alliance pour le génie biologique et médical) and the SFGBM (BioMedical Engineering French Society / Société française de génie biologique médical) and the AFIB (French Association of Biomedical Engineers / Association française des ingénieurs biomédicaux).
As a vehicle of information and knowledge in the field of biomedical technologies, IRBM is devoted to fundamental as well as clinical research. Biomedical engineering and use of new technologies are the cornerstones of IRBM, providing authors and users with the latest information. Its six issues per year propose reviews (state-of-the-art and current knowledge), original articles directed at fundamental research and articles focusing on biomedical engineering. All articles are submitted to peer reviewers acting as guarantors for IRBM''s scientific and medical content. The field covered by IRBM includes all the discipline of Biomedical engineering. Thereby, the type of papers published include those that cover the technological and methodological development in:
-Physiological and Biological Signal processing (EEG, MEG, ECG…)-
Medical Image processing-
Biomechanics-
Biomaterials-
Medical Physics-
Biophysics-
Physiological and Biological Sensors-
Information technologies in healthcare-
Disability research-
Computational physiology-
…



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
