Dongsheng Xie , Wenxin Chen , Jin Zhao , Xinya Song , Kaifeng Wang , Weiwei Xia , Haiying Liu , Fangle Chang , Changsheng Li , Xingguang Duan
{"title":"手术器械透明化:微创内镜手术中的闭塞清除","authors":"Dongsheng Xie , Wenxin Chen , Jin Zhao , Xinya Song , Kaifeng Wang , Weiwei Xia , Haiying Liu , Fangle Chang , Changsheng Li , Xingguang Duan","doi":"10.1016/j.birob.2023.100105","DOIUrl":null,"url":null,"abstract":"<div><p>Minimal invasion is an important trend in surgery. However, the endoscope, as one of the key devices for monitoring the process of minimally invasive surgery, is limited by its size and working space it operates in, which result in a considerably narrow field of view. In particular, when a surgical instrument enters through the tool channel, the instrument occupies most of the area in an endoscopic image. This hampers the surgeon’s field of view and has a negative impact on the surgery. This study proposes a novel method for removing the occlusion caused by surgical instruments in endoscopic images by making foreground occlusions on endoscopic images transparent using image restoration and interframe information filling. Compared with unprocessed images, this method can provide a clearer field of view that is necessary for minimally invasive endoscopic surgeries and improve the quality of surgeries. Clinical endoscopic images are used to verify the feasibility of the proposed method, and the results show that the proposed method improves the visual effect of endoscopic images by removing surgical-instrument occlusions. This demonstrates the considerable potential of the proposed method for use in clinical applications.</p></div>","PeriodicalId":100184,"journal":{"name":"Biomimetic Intelligence and Robotics","volume":"3 3","pages":"Article 100105"},"PeriodicalIF":5.4000,"publicationDate":"2023-09-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"2","resultStr":"{\"title\":\"Surgical instruments hyalinization: Occlusion removal in minimally invasive endoscopic surgery\",\"authors\":\"Dongsheng Xie , Wenxin Chen , Jin Zhao , Xinya Song , Kaifeng Wang , Weiwei Xia , Haiying Liu , Fangle Chang , Changsheng Li , Xingguang Duan\",\"doi\":\"10.1016/j.birob.2023.100105\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Minimal invasion is an important trend in surgery. However, the endoscope, as one of the key devices for monitoring the process of minimally invasive surgery, is limited by its size and working space it operates in, which result in a considerably narrow field of view. In particular, when a surgical instrument enters through the tool channel, the instrument occupies most of the area in an endoscopic image. This hampers the surgeon’s field of view and has a negative impact on the surgery. This study proposes a novel method for removing the occlusion caused by surgical instruments in endoscopic images by making foreground occlusions on endoscopic images transparent using image restoration and interframe information filling. Compared with unprocessed images, this method can provide a clearer field of view that is necessary for minimally invasive endoscopic surgeries and improve the quality of surgeries. Clinical endoscopic images are used to verify the feasibility of the proposed method, and the results show that the proposed method improves the visual effect of endoscopic images by removing surgical-instrument occlusions. This demonstrates the considerable potential of the proposed method for use in clinical applications.</p></div>\",\"PeriodicalId\":100184,\"journal\":{\"name\":\"Biomimetic Intelligence and Robotics\",\"volume\":\"3 3\",\"pages\":\"Article 100105\"},\"PeriodicalIF\":5.4000,\"publicationDate\":\"2023-09-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"2\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Biomimetic Intelligence and Robotics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2667379723000190\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biomimetic Intelligence and Robotics","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2667379723000190","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Surgical instruments hyalinization: Occlusion removal in minimally invasive endoscopic surgery
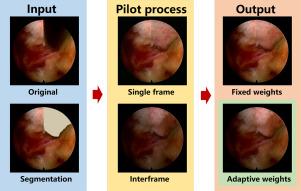
Minimal invasion is an important trend in surgery. However, the endoscope, as one of the key devices for monitoring the process of minimally invasive surgery, is limited by its size and working space it operates in, which result in a considerably narrow field of view. In particular, when a surgical instrument enters through the tool channel, the instrument occupies most of the area in an endoscopic image. This hampers the surgeon’s field of view and has a negative impact on the surgery. This study proposes a novel method for removing the occlusion caused by surgical instruments in endoscopic images by making foreground occlusions on endoscopic images transparent using image restoration and interframe information filling. Compared with unprocessed images, this method can provide a clearer field of view that is necessary for minimally invasive endoscopic surgeries and improve the quality of surgeries. Clinical endoscopic images are used to verify the feasibility of the proposed method, and the results show that the proposed method improves the visual effect of endoscopic images by removing surgical-instrument occlusions. This demonstrates the considerable potential of the proposed method for use in clinical applications.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
