{"title":"共享控制中势场驱动模型预测控制器的参数效应","authors":"Mingjun Li, Chao Jiang, Xiaolin Song, Haotian Cao","doi":"10.1007/s42154-022-00189-x","DOIUrl":null,"url":null,"abstract":"<div><p>Parameter effects of the potential-field-driven model predictive control (PF-MPC) method on performances of shared control systems during obstacles avoidance are investigated. The PF-MPC controllers of autonomous driving and shared control systems are designed based on the constructed potential fields and model predictive control method, and the driver-vehicle dynamics and the driver-related costs are also considered in the design of the shared controller. To explore a potential approach of alleviating driver-automation conflicts of the shared control systems, different motion planning results generated by the PF-MPC controller are explored by adjusting effects of potential fields’ parameters, which provides possibilities to decrease driver-automation conflicts between the planned trajectory and driver’s target path. Moreover, two case studies are designed to discuss different frameworks and parameters effects on shared control systems. Results show that the proposed shared control frameworks considering driver-vehicle dynamics and the driver-related cost show better performances regarding driver-automation conflicts management and driving safety than the decentralized control framework. And the longitudinal normalized constant of potential fields parameters shows influences on the driver-automation conflicts management and driving safety performances of shared control.</p></div>","PeriodicalId":36310,"journal":{"name":"Automotive Innovation","volume":"6 1","pages":"48 - 61"},"PeriodicalIF":5.0000,"publicationDate":"2022-08-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Parameter Effects of the Potential-Field-Driven Model Predictive Controller for Shared Control\",\"authors\":\"Mingjun Li, Chao Jiang, Xiaolin Song, Haotian Cao\",\"doi\":\"10.1007/s42154-022-00189-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Parameter effects of the potential-field-driven model predictive control (PF-MPC) method on performances of shared control systems during obstacles avoidance are investigated. The PF-MPC controllers of autonomous driving and shared control systems are designed based on the constructed potential fields and model predictive control method, and the driver-vehicle dynamics and the driver-related costs are also considered in the design of the shared controller. To explore a potential approach of alleviating driver-automation conflicts of the shared control systems, different motion planning results generated by the PF-MPC controller are explored by adjusting effects of potential fields’ parameters, which provides possibilities to decrease driver-automation conflicts between the planned trajectory and driver’s target path. Moreover, two case studies are designed to discuss different frameworks and parameters effects on shared control systems. Results show that the proposed shared control frameworks considering driver-vehicle dynamics and the driver-related cost show better performances regarding driver-automation conflicts management and driving safety than the decentralized control framework. And the longitudinal normalized constant of potential fields parameters shows influences on the driver-automation conflicts management and driving safety performances of shared control.</p></div>\",\"PeriodicalId\":36310,\"journal\":{\"name\":\"Automotive Innovation\",\"volume\":\"6 1\",\"pages\":\"48 - 61\"},\"PeriodicalIF\":5.0000,\"publicationDate\":\"2022-08-22\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Automotive Innovation\",\"FirstCategoryId\":\"1087\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s42154-022-00189-x\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Automotive Innovation","FirstCategoryId":"1087","ListUrlMain":"https://link.springer.com/article/10.1007/s42154-022-00189-x","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Parameter Effects of the Potential-Field-Driven Model Predictive Controller for Shared Control
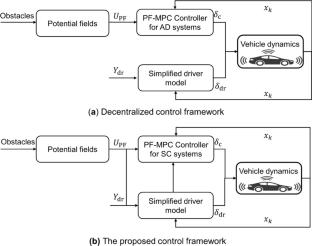
Parameter effects of the potential-field-driven model predictive control (PF-MPC) method on performances of shared control systems during obstacles avoidance are investigated. The PF-MPC controllers of autonomous driving and shared control systems are designed based on the constructed potential fields and model predictive control method, and the driver-vehicle dynamics and the driver-related costs are also considered in the design of the shared controller. To explore a potential approach of alleviating driver-automation conflicts of the shared control systems, different motion planning results generated by the PF-MPC controller are explored by adjusting effects of potential fields’ parameters, which provides possibilities to decrease driver-automation conflicts between the planned trajectory and driver’s target path. Moreover, two case studies are designed to discuss different frameworks and parameters effects on shared control systems. Results show that the proposed shared control frameworks considering driver-vehicle dynamics and the driver-related cost show better performances regarding driver-automation conflicts management and driving safety than the decentralized control framework. And the longitudinal normalized constant of potential fields parameters shows influences on the driver-automation conflicts management and driving safety performances of shared control.
期刊介绍:
Automotive Innovation is dedicated to the publication of innovative findings in the automotive field as well as other related disciplines, covering the principles, methodologies, theoretical studies, experimental studies, product engineering and engineering application. The main topics include but are not limited to: energy-saving, electrification, intelligent and connected, new energy vehicle, safety and lightweight technologies. The journal presents the latest trend and advances of automotive technology.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
