Laura Aymerich-Franch, Damien Petit, Gowrishankar Ganesh, Abderrahmane Kheddar
{"title":"由人形机器人化身触摸物体会在真实的手上产生触觉","authors":"Laura Aymerich-Franch, Damien Petit, Gowrishankar Ganesh, Abderrahmane Kheddar","doi":"10.1111/jcc4.12188","DOIUrl":null,"url":null,"abstract":"<div>\n \n <p>Humanoid robot embodiment is a recently developed form of mediated embodiment. In 2 studies, we report and quantify a new haptic (touch) illusion during embodiment of a humanoid robot. Around 60% of the users in our studies reported haptic sensations in their real hand when they observed their robot avatar touching a curtain with its hand. Critically, our study shows for the first time that users can experience haptic sensations from a nonanthropomorphic embodied limb/agent with visual feedback alone (i.e. no haptic feedback provided). The results have important implications for the understanding of the cognitive processes governing mediated embodiment and the design of avatar scenarios.</p>\n </div>","PeriodicalId":48319,"journal":{"name":"Journal of Computer-Mediated Communication","volume":"22 4","pages":"215-230"},"PeriodicalIF":5.7000,"publicationDate":"2017-07-10","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1111/jcc4.12188","citationCount":"24","resultStr":"{\"title\":\"Object Touch by a Humanoid Robot Avatar Induces Haptic Sensation in the Real Hand\",\"authors\":\"Laura Aymerich-Franch, Damien Petit, Gowrishankar Ganesh, Abderrahmane Kheddar\",\"doi\":\"10.1111/jcc4.12188\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n \\n <p>Humanoid robot embodiment is a recently developed form of mediated embodiment. In 2 studies, we report and quantify a new haptic (touch) illusion during embodiment of a humanoid robot. Around 60% of the users in our studies reported haptic sensations in their real hand when they observed their robot avatar touching a curtain with its hand. Critically, our study shows for the first time that users can experience haptic sensations from a nonanthropomorphic embodied limb/agent with visual feedback alone (i.e. no haptic feedback provided). The results have important implications for the understanding of the cognitive processes governing mediated embodiment and the design of avatar scenarios.</p>\\n </div>\",\"PeriodicalId\":48319,\"journal\":{\"name\":\"Journal of Computer-Mediated Communication\",\"volume\":\"22 4\",\"pages\":\"215-230\"},\"PeriodicalIF\":5.7000,\"publicationDate\":\"2017-07-10\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.1111/jcc4.12188\",\"citationCount\":\"24\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Computer-Mediated Communication\",\"FirstCategoryId\":\"98\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1111/jcc4.12188\",\"RegionNum\":1,\"RegionCategory\":\"文学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"COMMUNICATION\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Computer-Mediated Communication","FirstCategoryId":"98","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1111/jcc4.12188","RegionNum":1,"RegionCategory":"文学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMMUNICATION","Score":null,"Total":0}
Object Touch by a Humanoid Robot Avatar Induces Haptic Sensation in the Real Hand
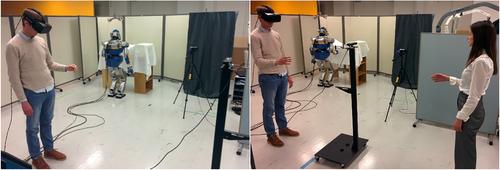
Humanoid robot embodiment is a recently developed form of mediated embodiment. In 2 studies, we report and quantify a new haptic (touch) illusion during embodiment of a humanoid robot. Around 60% of the users in our studies reported haptic sensations in their real hand when they observed their robot avatar touching a curtain with its hand. Critically, our study shows for the first time that users can experience haptic sensations from a nonanthropomorphic embodied limb/agent with visual feedback alone (i.e. no haptic feedback provided). The results have important implications for the understanding of the cognitive processes governing mediated embodiment and the design of avatar scenarios.
期刊介绍:
The Journal of Computer-Mediated Communication (JCMC) has been a longstanding contributor to the field of computer-mediated communication research. Since its inception in 1995, it has been a pioneer in web-based, peer-reviewed scholarly publications. JCMC encourages interdisciplinary research, welcoming contributions from various disciplines, such as communication, business, education, political science, sociology, psychology, media studies, and information science. The journal's commitment to open access and high-quality standards has solidified its status as a reputable source for scholars exploring the dynamics of communication in the digital age.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
