{"title":"磁驱动四足软微型机器人的多模式运动与货物运输。","authors":"Chenyang Huang, Zhengyu Lai, Xinyu Wu, Tiantian Xu","doi":"10.34133/cbsystems.0004","DOIUrl":null,"url":null,"abstract":"<p><p>Untethered microrobots have attracted extensive attention due to their potential for biomedical applications and micromanipulation at the small scale. Soft microrobots are of great research importance because of their highly deformable ability to achieve not only multiple locomotion mechanisms but also minimal invasion to the environment. However, the existing microrobots are still limited in their ability to locomote and cross obstacles in unstructured environments compared to conventional legged robots. Nature provides much inspiration for developing miniature robots. Here, we propose a bionic quadruped soft thin-film microrobot with a nonmagnetic soft body and 4 magnetic flexible legs. The quadruped soft microrobot can achieve multiple controllable locomotion modes in the external magnetic field. The experiment demonstrated the robot's excellent obstacle-crossing ability by walking on the surface with steps and moving in the bottom of a stomach model with gullies. In particular, by controlling the conical angle of the external conical magnetic field, microbeads gripping, transportation, and release of the microrobot were demonstrated. In the future, the quadruped microrobot with excellent obstacle-crossing and gripping capabilities will be relevant for biomedical applications and micromanipulation.</p>","PeriodicalId":72764,"journal":{"name":"Cyborg and bionic systems (Washington, D.C.)","volume":"2022 ","pages":"0004"},"PeriodicalIF":18.1000,"publicationDate":"2022-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10010670/pdf/","citationCount":"28","resultStr":"{\"title\":\"Multimodal Locomotion and Cargo Transportation of Magnetically Actuated Quadruped Soft Microrobots.\",\"authors\":\"Chenyang Huang, Zhengyu Lai, Xinyu Wu, Tiantian Xu\",\"doi\":\"10.34133/cbsystems.0004\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Untethered microrobots have attracted extensive attention due to their potential for biomedical applications and micromanipulation at the small scale. Soft microrobots are of great research importance because of their highly deformable ability to achieve not only multiple locomotion mechanisms but also minimal invasion to the environment. However, the existing microrobots are still limited in their ability to locomote and cross obstacles in unstructured environments compared to conventional legged robots. Nature provides much inspiration for developing miniature robots. Here, we propose a bionic quadruped soft thin-film microrobot with a nonmagnetic soft body and 4 magnetic flexible legs. The quadruped soft microrobot can achieve multiple controllable locomotion modes in the external magnetic field. The experiment demonstrated the robot's excellent obstacle-crossing ability by walking on the surface with steps and moving in the bottom of a stomach model with gullies. In particular, by controlling the conical angle of the external conical magnetic field, microbeads gripping, transportation, and release of the microrobot were demonstrated. In the future, the quadruped microrobot with excellent obstacle-crossing and gripping capabilities will be relevant for biomedical applications and micromanipulation.</p>\",\"PeriodicalId\":72764,\"journal\":{\"name\":\"Cyborg and bionic systems (Washington, D.C.)\",\"volume\":\"2022 \",\"pages\":\"0004\"},\"PeriodicalIF\":18.1000,\"publicationDate\":\"2022-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10010670/pdf/\",\"citationCount\":\"28\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Cyborg and bionic systems (Washington, D.C.)\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.34133/cbsystems.0004\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cyborg and bionic systems (Washington, D.C.)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.34133/cbsystems.0004","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
Multimodal Locomotion and Cargo Transportation of Magnetically Actuated Quadruped Soft Microrobots.
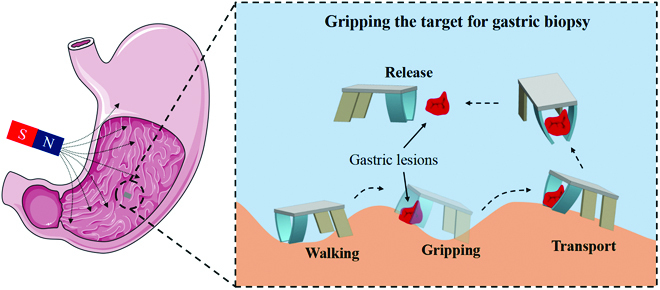
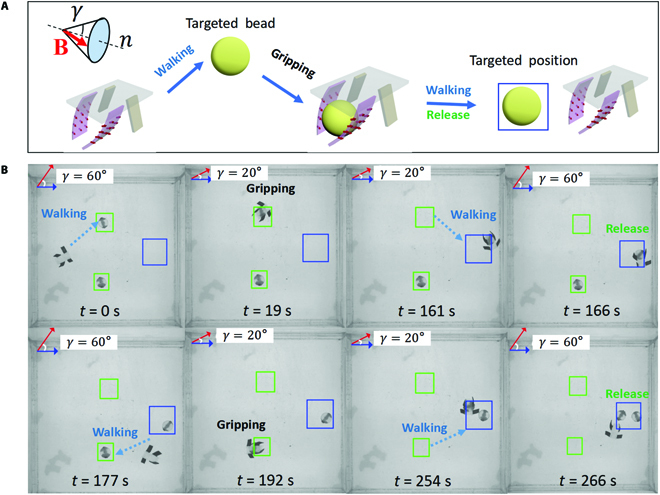
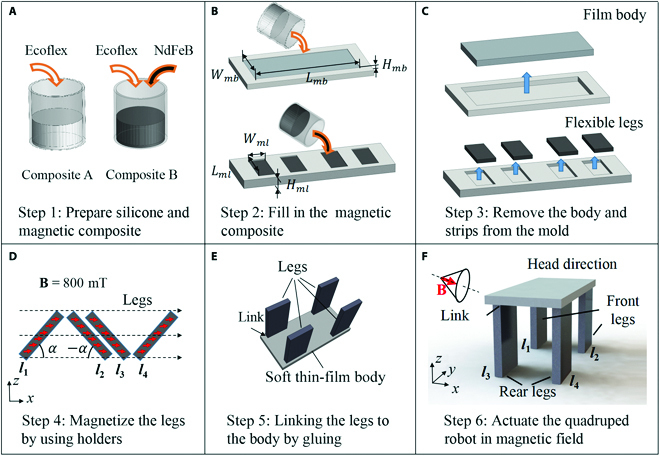
Untethered microrobots have attracted extensive attention due to their potential for biomedical applications and micromanipulation at the small scale. Soft microrobots are of great research importance because of their highly deformable ability to achieve not only multiple locomotion mechanisms but also minimal invasion to the environment. However, the existing microrobots are still limited in their ability to locomote and cross obstacles in unstructured environments compared to conventional legged robots. Nature provides much inspiration for developing miniature robots. Here, we propose a bionic quadruped soft thin-film microrobot with a nonmagnetic soft body and 4 magnetic flexible legs. The quadruped soft microrobot can achieve multiple controllable locomotion modes in the external magnetic field. The experiment demonstrated the robot's excellent obstacle-crossing ability by walking on the surface with steps and moving in the bottom of a stomach model with gullies. In particular, by controlling the conical angle of the external conical magnetic field, microbeads gripping, transportation, and release of the microrobot were demonstrated. In the future, the quadruped microrobot with excellent obstacle-crossing and gripping capabilities will be relevant for biomedical applications and micromanipulation.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
