{"title":"颧骨种植体植入和即刻加载种植体支撑全牙弓修复的自主机器人手术:初步研究。","authors":"Changjian Li, Menglin Wang, Huanze Deng, Shumao Li, Xinyu Fang, Yijie Liang, Xihua Ma, Yue Zhang, Yanfeng Li","doi":"10.1186/s40729-023-00474-2","DOIUrl":null,"url":null,"abstract":"<p><strong>Objectives: </strong>A patient with extensive atrophy of the alveolar ridge in the posterior portion of the maxilla was selected to complete an experimental and clinical case of the robotic zygomatic implant to investigate the viability of an implant robotic system in clinical use.</p><p><strong>Methods: </strong>The preoperative digital information was collected, and the implantation position and personalized optimization marks needed for robot surgery were designed in advance in a repair-oriented way. The resin models and marks of the patient's maxilla and mandible are all printed in 3D. Custom-made special precision drills and handpiece holders for robotic zygomatic implants were used to perform model experiments and compare the accuracy of the robotic zygomatic implant group (implant length = 52.5 mm, n = 10) with the alveolar implant group (implant length = 18 mm, n = 20). Based on the results of extraoral experiments, a clinical case of robotic surgery for zygomatic implant placement and immediate loading of implant-supported full arch prosthesis was carried out.</p><p><strong>Results: </strong>In the model experiment, the zygomatic implant group reported an entry point error of 0.78 ± 0.34 mm, an exit point error of 0.80 ± 0.25 mm, and an angle error of 1.33 ± 0.41degrees. In comparison, the alveolar implant group (control group) reported an entry point error of 0.81 ± 0.24 mm, an exit point error of 0.86 ± 0.32 mm, and an angle error of 1.71 ± 0.71 degrees. There was no significant difference between the two groups (p > 0.05). In clinical cases, the average entry point error of two zygomatic implants is 0.83 mm, the average exit point error is 1.10 mm and the angle error is 1.46 degrees.</p><p><strong>Conclusions: </strong>The preoperative planning and surgical procedures developed in this study provide enough accuracy for robotic zygomatic implant surgery, and the overall deviation is small, which is not affected by the lateral wall deviation of maxillary sinus.</p>","PeriodicalId":14076,"journal":{"name":"International Journal of Implant Dentistry","volume":"9 1","pages":"12"},"PeriodicalIF":4.0000,"publicationDate":"2023-05-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10199156/pdf/","citationCount":"0","resultStr":"{\"title\":\"Autonomous robotic surgery for zygomatic implant placement and immediately loaded implant-supported full-arch prosthesis: a preliminary research.\",\"authors\":\"Changjian Li, Menglin Wang, Huanze Deng, Shumao Li, Xinyu Fang, Yijie Liang, Xihua Ma, Yue Zhang, Yanfeng Li\",\"doi\":\"10.1186/s40729-023-00474-2\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Objectives: </strong>A patient with extensive atrophy of the alveolar ridge in the posterior portion of the maxilla was selected to complete an experimental and clinical case of the robotic zygomatic implant to investigate the viability of an implant robotic system in clinical use.</p><p><strong>Methods: </strong>The preoperative digital information was collected, and the implantation position and personalized optimization marks needed for robot surgery were designed in advance in a repair-oriented way. The resin models and marks of the patient's maxilla and mandible are all printed in 3D. Custom-made special precision drills and handpiece holders for robotic zygomatic implants were used to perform model experiments and compare the accuracy of the robotic zygomatic implant group (implant length = 52.5 mm, n = 10) with the alveolar implant group (implant length = 18 mm, n = 20). Based on the results of extraoral experiments, a clinical case of robotic surgery for zygomatic implant placement and immediate loading of implant-supported full arch prosthesis was carried out.</p><p><strong>Results: </strong>In the model experiment, the zygomatic implant group reported an entry point error of 0.78 ± 0.34 mm, an exit point error of 0.80 ± 0.25 mm, and an angle error of 1.33 ± 0.41degrees. In comparison, the alveolar implant group (control group) reported an entry point error of 0.81 ± 0.24 mm, an exit point error of 0.86 ± 0.32 mm, and an angle error of 1.71 ± 0.71 degrees. There was no significant difference between the two groups (p > 0.05). In clinical cases, the average entry point error of two zygomatic implants is 0.83 mm, the average exit point error is 1.10 mm and the angle error is 1.46 degrees.</p><p><strong>Conclusions: </strong>The preoperative planning and surgical procedures developed in this study provide enough accuracy for robotic zygomatic implant surgery, and the overall deviation is small, which is not affected by the lateral wall deviation of maxillary sinus.</p>\",\"PeriodicalId\":14076,\"journal\":{\"name\":\"International Journal of Implant Dentistry\",\"volume\":\"9 1\",\"pages\":\"12\"},\"PeriodicalIF\":4.0000,\"publicationDate\":\"2023-05-19\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10199156/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Implant Dentistry\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://doi.org/10.1186/s40729-023-00474-2\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"DENTISTRY, ORAL SURGERY & MEDICINE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Implant Dentistry","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1186/s40729-023-00474-2","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"DENTISTRY, ORAL SURGERY & MEDICINE","Score":null,"Total":0}
Autonomous robotic surgery for zygomatic implant placement and immediately loaded implant-supported full-arch prosthesis: a preliminary research.
Objectives: A patient with extensive atrophy of the alveolar ridge in the posterior portion of the maxilla was selected to complete an experimental and clinical case of the robotic zygomatic implant to investigate the viability of an implant robotic system in clinical use.
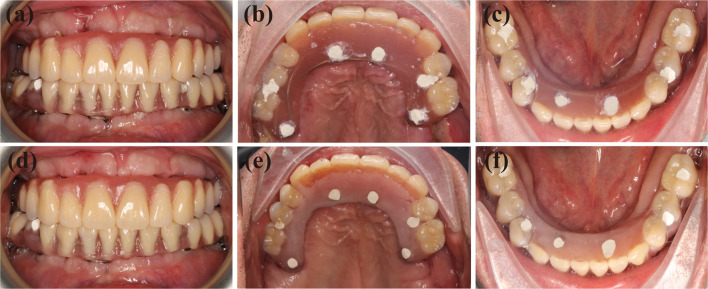
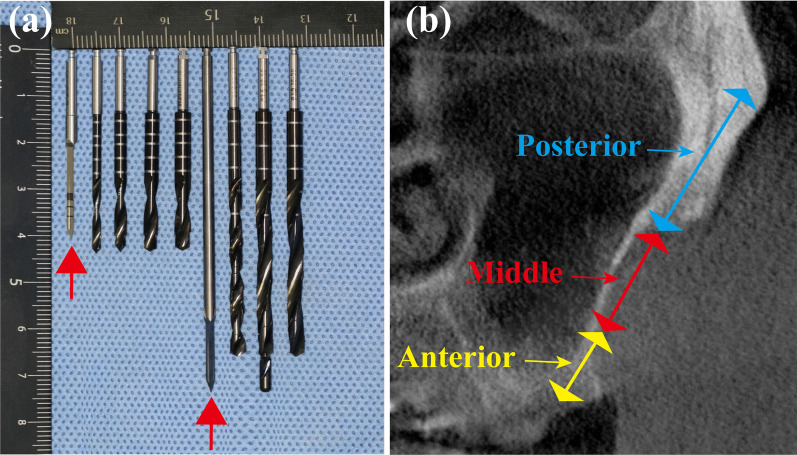
Methods: The preoperative digital information was collected, and the implantation position and personalized optimization marks needed for robot surgery were designed in advance in a repair-oriented way. The resin models and marks of the patient's maxilla and mandible are all printed in 3D. Custom-made special precision drills and handpiece holders for robotic zygomatic implants were used to perform model experiments and compare the accuracy of the robotic zygomatic implant group (implant length = 52.5 mm, n = 10) with the alveolar implant group (implant length = 18 mm, n = 20). Based on the results of extraoral experiments, a clinical case of robotic surgery for zygomatic implant placement and immediate loading of implant-supported full arch prosthesis was carried out.
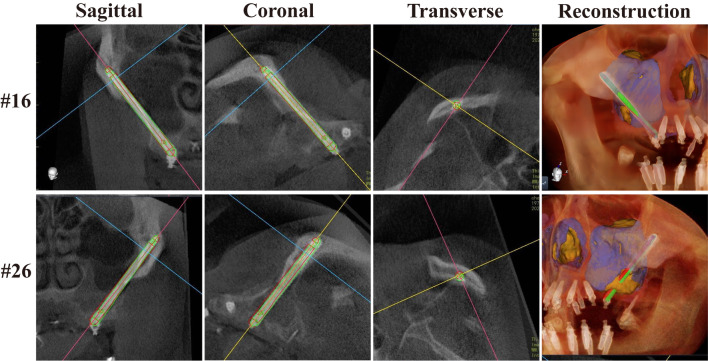
Results: In the model experiment, the zygomatic implant group reported an entry point error of 0.78 ± 0.34 mm, an exit point error of 0.80 ± 0.25 mm, and an angle error of 1.33 ± 0.41degrees. In comparison, the alveolar implant group (control group) reported an entry point error of 0.81 ± 0.24 mm, an exit point error of 0.86 ± 0.32 mm, and an angle error of 1.71 ± 0.71 degrees. There was no significant difference between the two groups (p > 0.05). In clinical cases, the average entry point error of two zygomatic implants is 0.83 mm, the average exit point error is 1.10 mm and the angle error is 1.46 degrees.
Conclusions: The preoperative planning and surgical procedures developed in this study provide enough accuracy for robotic zygomatic implant surgery, and the overall deviation is small, which is not affected by the lateral wall deviation of maxillary sinus.
期刊介绍:
The International Journal of Implant Dentistry is a peer-reviewed open access journal published under the SpringerOpen brand. The journal is dedicated to promoting the exchange and discussion of all research areas relevant to implant dentistry in the form of systematic literature or invited reviews, prospective and retrospective clinical studies, clinical case reports, basic laboratory and animal research, and articles on material research and engineering.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
