{"title":"用于肺部病变导航和活检的新型机器人支气管镜系统","authors":"Xingguang Duan, Dongsheng Xie, Runtian Zhang, Xiaotian Li, Jiali Sun, Chao Qian, Xinya Song, Changsheng Li","doi":"10.34133/cbsystems.0013","DOIUrl":null,"url":null,"abstract":"<p><p>Transbronchial biopsy sampling, as a minimally invasive method with relatively low risk, has been proved to be a promising treatment in the field of respiratory surgery. Although several robotic bronchoscopes have been developed, it remains a great challenge to balance size and flexibility, while integrating multisensors to realize navigation during complex airway networks. This paper proposes a novel robotic bronchoscope system composed by end effector with relatively small size, relevant actuation unit, and navigation system with path planning and surgical guidance capability. The main part of the end effector is machined by bidirectional groove on a nickel-titanium tube, which can realize bending, rotation, and translation 3 degrees of freedom. A prototype of the proposed robotic bronchoscope system is designed and fabricated, and its performance is tested through several experiments to verify the stiffness, flexibility, and navigation performance. The results show that the proposed system is with good environment adaptiveness, and it can become a promising biopsy method through natural cavity of the human body.</p>","PeriodicalId":72764,"journal":{"name":"Cyborg and bionic systems (Washington, D.C.)","volume":"4 ","pages":"0013"},"PeriodicalIF":18.1000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10026825/pdf/","citationCount":"0","resultStr":"{\"title\":\"A Novel Robotic Bronchoscope System for Navigation and Biopsy of Pulmonary Lesions.\",\"authors\":\"Xingguang Duan, Dongsheng Xie, Runtian Zhang, Xiaotian Li, Jiali Sun, Chao Qian, Xinya Song, Changsheng Li\",\"doi\":\"10.34133/cbsystems.0013\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Transbronchial biopsy sampling, as a minimally invasive method with relatively low risk, has been proved to be a promising treatment in the field of respiratory surgery. Although several robotic bronchoscopes have been developed, it remains a great challenge to balance size and flexibility, while integrating multisensors to realize navigation during complex airway networks. This paper proposes a novel robotic bronchoscope system composed by end effector with relatively small size, relevant actuation unit, and navigation system with path planning and surgical guidance capability. The main part of the end effector is machined by bidirectional groove on a nickel-titanium tube, which can realize bending, rotation, and translation 3 degrees of freedom. A prototype of the proposed robotic bronchoscope system is designed and fabricated, and its performance is tested through several experiments to verify the stiffness, flexibility, and navigation performance. The results show that the proposed system is with good environment adaptiveness, and it can become a promising biopsy method through natural cavity of the human body.</p>\",\"PeriodicalId\":72764,\"journal\":{\"name\":\"Cyborg and bionic systems (Washington, D.C.)\",\"volume\":\"4 \",\"pages\":\"0013\"},\"PeriodicalIF\":18.1000,\"publicationDate\":\"2023-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10026825/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Cyborg and bionic systems (Washington, D.C.)\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.34133/cbsystems.0013\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2023/3/15 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cyborg and bionic systems (Washington, D.C.)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.34133/cbsystems.0013","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/3/15 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
A Novel Robotic Bronchoscope System for Navigation and Biopsy of Pulmonary Lesions.
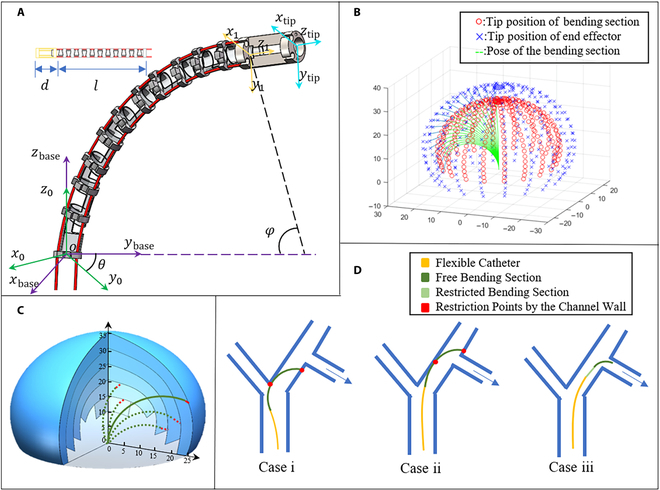
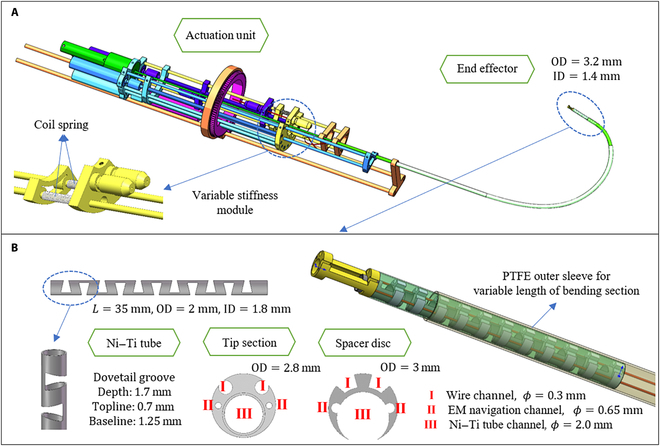
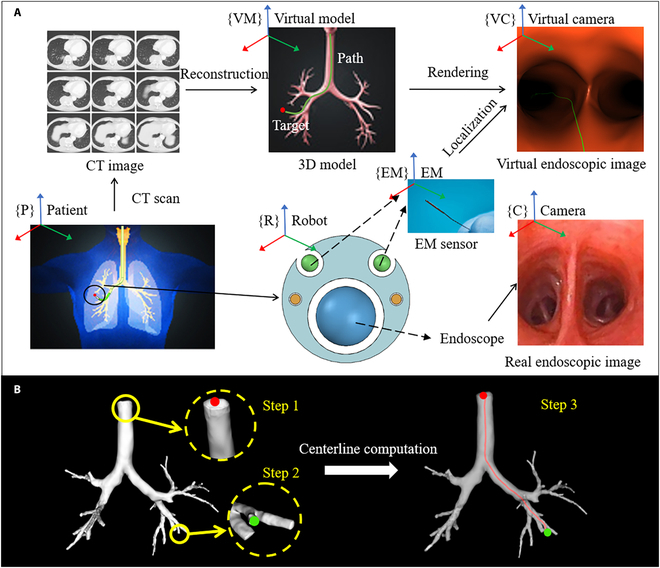
Transbronchial biopsy sampling, as a minimally invasive method with relatively low risk, has been proved to be a promising treatment in the field of respiratory surgery. Although several robotic bronchoscopes have been developed, it remains a great challenge to balance size and flexibility, while integrating multisensors to realize navigation during complex airway networks. This paper proposes a novel robotic bronchoscope system composed by end effector with relatively small size, relevant actuation unit, and navigation system with path planning and surgical guidance capability. The main part of the end effector is machined by bidirectional groove on a nickel-titanium tube, which can realize bending, rotation, and translation 3 degrees of freedom. A prototype of the proposed robotic bronchoscope system is designed and fabricated, and its performance is tested through several experiments to verify the stiffness, flexibility, and navigation performance. The results show that the proposed system is with good environment adaptiveness, and it can become a promising biopsy method through natural cavity of the human body.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
