{"title":"为表达能力下降的人提供的多模式家政服务机器人交互系统。","authors":"Chaolong Qin, Aiguo Song, Linhu Wei, Yu Zhao","doi":"10.1007/s11370-023-00466-6","DOIUrl":null,"url":null,"abstract":"<p><p>Driven by the shortage of qualified nurses and the increasing average age of the population, the ambient assisted living style using intelligent service robots and smart home systems has become an excellent choice to free up caregiver time and energy and provide users with a sense of independence. However, users' unique environments and differences in abilities to express themselves through different interaction modalities make intention recognition and interaction between user and service system very difficult, limiting the use of these new nursing technologies. This paper presents a multimodal domestic service robot interaction system and proposes a multimodal fusion algorithm for intention recognition to deal with these problems. The impacts of short-term and long-term changes were taken into account. Implemented interaction modalities include touch, voice, myoelectricity gesture, visual gesture, and haptics. Users could freely choose one or more modalities through which to express themselves. Virtual games and virtual activities of independent living were designed for pre-training and evaluating users' abilities to use different interaction modalities in their unique environments. A domestic service robot interaction system was built, on which a set of experiments were carried out to test the system's stability and intention recognition ability in different scenarios. The experiment results show that the system is stable and effective and can adapt to different scenarios. In addition, the intention recognition rate in the experiments was 93.62%. Older adults could master the system quickly and use it to provide some assistance for their independent living.</p>","PeriodicalId":48813,"journal":{"name":"Intelligent Service Robotics","volume":" ","pages":"1-20"},"PeriodicalIF":2.3000,"publicationDate":"2023-06-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10239553/pdf/","citationCount":"0","resultStr":"{\"title\":\"A multimodal domestic service robot interaction system for people with declined abilities to express themselves.\",\"authors\":\"Chaolong Qin, Aiguo Song, Linhu Wei, Yu Zhao\",\"doi\":\"10.1007/s11370-023-00466-6\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Driven by the shortage of qualified nurses and the increasing average age of the population, the ambient assisted living style using intelligent service robots and smart home systems has become an excellent choice to free up caregiver time and energy and provide users with a sense of independence. However, users' unique environments and differences in abilities to express themselves through different interaction modalities make intention recognition and interaction between user and service system very difficult, limiting the use of these new nursing technologies. This paper presents a multimodal domestic service robot interaction system and proposes a multimodal fusion algorithm for intention recognition to deal with these problems. The impacts of short-term and long-term changes were taken into account. Implemented interaction modalities include touch, voice, myoelectricity gesture, visual gesture, and haptics. Users could freely choose one or more modalities through which to express themselves. Virtual games and virtual activities of independent living were designed for pre-training and evaluating users' abilities to use different interaction modalities in their unique environments. A domestic service robot interaction system was built, on which a set of experiments were carried out to test the system's stability and intention recognition ability in different scenarios. The experiment results show that the system is stable and effective and can adapt to different scenarios. In addition, the intention recognition rate in the experiments was 93.62%. Older adults could master the system quickly and use it to provide some assistance for their independent living.</p>\",\"PeriodicalId\":48813,\"journal\":{\"name\":\"Intelligent Service Robotics\",\"volume\":\" \",\"pages\":\"1-20\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2023-06-04\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10239553/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Intelligent Service Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s11370-023-00466-6\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Intelligent Service Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s11370-023-00466-6","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
A multimodal domestic service robot interaction system for people with declined abilities to express themselves.
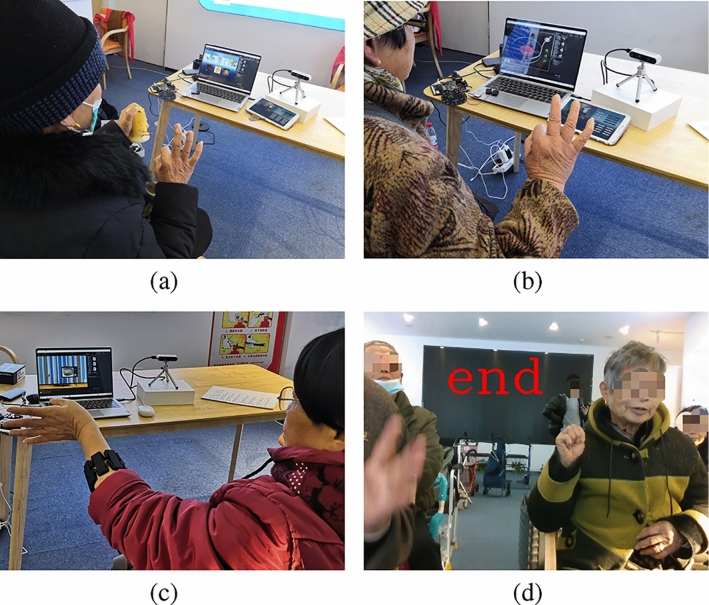
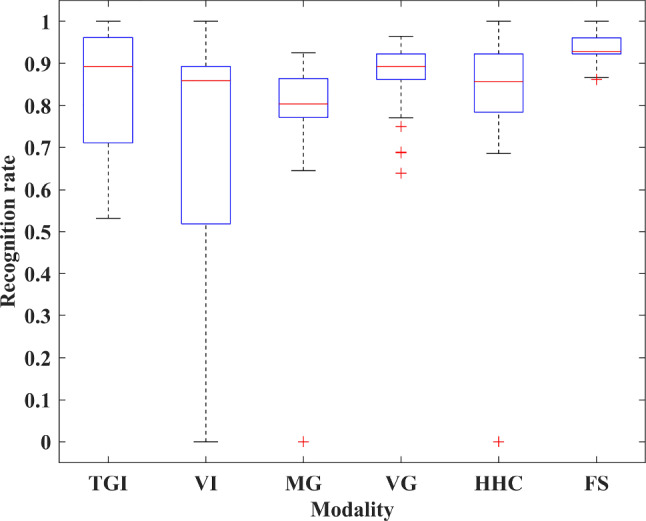
Driven by the shortage of qualified nurses and the increasing average age of the population, the ambient assisted living style using intelligent service robots and smart home systems has become an excellent choice to free up caregiver time and energy and provide users with a sense of independence. However, users' unique environments and differences in abilities to express themselves through different interaction modalities make intention recognition and interaction between user and service system very difficult, limiting the use of these new nursing technologies. This paper presents a multimodal domestic service robot interaction system and proposes a multimodal fusion algorithm for intention recognition to deal with these problems. The impacts of short-term and long-term changes were taken into account. Implemented interaction modalities include touch, voice, myoelectricity gesture, visual gesture, and haptics. Users could freely choose one or more modalities through which to express themselves. Virtual games and virtual activities of independent living were designed for pre-training and evaluating users' abilities to use different interaction modalities in their unique environments. A domestic service robot interaction system was built, on which a set of experiments were carried out to test the system's stability and intention recognition ability in different scenarios. The experiment results show that the system is stable and effective and can adapt to different scenarios. In addition, the intention recognition rate in the experiments was 93.62%. Older adults could master the system quickly and use it to provide some assistance for their independent living.
期刊介绍:
The journal directs special attention to the emerging significance of integrating robotics with information technology and cognitive science (such as ubiquitous and adaptive computing,information integration in a distributed environment, and cognitive modelling for human-robot interaction), which spurs innovation toward a new multi-dimensional robotic service to humans. The journal intends to capture and archive this emerging yet significant advancement in the field of intelligent service robotics. The journal will publish original papers of innovative ideas and concepts, new discoveries and improvements, as well as novel applications and business models which are related to the field of intelligent service robotics described above and are proven to be of high quality. The areas that the Journal will cover include, but are not limited to: Intelligent robots serving humans in daily life or in a hazardous environment, such as home or personal service robots, entertainment robots, education robots, medical robots, healthcare and rehabilitation robots, and rescue robots (Service Robotics); Intelligent robotic functions in the form of embedded systems for applications to, for example, intelligent space, intelligent vehicles and transportation systems, intelligent manufacturing systems, and intelligent medical facilities (Embedded Robotics); The integration of robotics with network technologies, generating such services and solutions as distributed robots, distance robotic education-aides, and virtual laboratories or museums (Networked Robotics).




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
