{"title":"基于cvt的异步脑机接口脑控机器人导航。","authors":"Mengfan Li, Ran Wei, Ziqi Zhang, Pengfei Zhang, Guizhi Xu, Wenzhe Liao","doi":"10.34133/cbsystems.0024","DOIUrl":null,"url":null,"abstract":"<p><p>Brain-computer interface (BCI) is a typical direction of integration of human intelligence and robot intelligence. Shared control is an essential form of combining human and robot agents in a common task, but still faces a lack of freedom for the human agent. This paper proposes a Centroidal Voronoi Tessellation (CVT)-based road segmentation approach for brain-controlled robot navigation by means of asynchronous BCI. An electromyogram-based asynchronous mechanism is introduced into the BCI system for self-paced control. A novel CVT-based road segmentation method is provided to generate optional navigation goals in the road area for arbitrary goal selection. An event-related potential of the BCI is designed for target selection to communicate with the robot. The robot has an autonomous navigation function to reach the human selected goals. A comparison experiment in the single-step control pattern is executed to verify the effectiveness of the CVT-based asynchronous (CVT-A) BCI system. Eight subjects participated in the experiment, and they were instructed to control the robot to navigate toward a destination with obstacle avoidance tasks. The results show that the CVT-A BCI system can shorten the task duration, decrease the command times, and optimize navigation path, compared with the single-step pattern. Moreover, this shared control mechanism of the CVT-A BCI system contributes to the promotion of human and robot agent integration control in unstructured environments.</p>","PeriodicalId":72764,"journal":{"name":"Cyborg and bionic systems (Washington, D.C.)","volume":"4 ","pages":"0024"},"PeriodicalIF":18.1000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10202181/pdf/","citationCount":"1","resultStr":"{\"title\":\"CVT-Based Asynchronous BCI for Brain-Controlled Robot Navigation.\",\"authors\":\"Mengfan Li, Ran Wei, Ziqi Zhang, Pengfei Zhang, Guizhi Xu, Wenzhe Liao\",\"doi\":\"10.34133/cbsystems.0024\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Brain-computer interface (BCI) is a typical direction of integration of human intelligence and robot intelligence. Shared control is an essential form of combining human and robot agents in a common task, but still faces a lack of freedom for the human agent. This paper proposes a Centroidal Voronoi Tessellation (CVT)-based road segmentation approach for brain-controlled robot navigation by means of asynchronous BCI. An electromyogram-based asynchronous mechanism is introduced into the BCI system for self-paced control. A novel CVT-based road segmentation method is provided to generate optional navigation goals in the road area for arbitrary goal selection. An event-related potential of the BCI is designed for target selection to communicate with the robot. The robot has an autonomous navigation function to reach the human selected goals. A comparison experiment in the single-step control pattern is executed to verify the effectiveness of the CVT-based asynchronous (CVT-A) BCI system. Eight subjects participated in the experiment, and they were instructed to control the robot to navigate toward a destination with obstacle avoidance tasks. The results show that the CVT-A BCI system can shorten the task duration, decrease the command times, and optimize navigation path, compared with the single-step pattern. Moreover, this shared control mechanism of the CVT-A BCI system contributes to the promotion of human and robot agent integration control in unstructured environments.</p>\",\"PeriodicalId\":72764,\"journal\":{\"name\":\"Cyborg and bionic systems (Washington, D.C.)\",\"volume\":\"4 \",\"pages\":\"0024\"},\"PeriodicalIF\":18.1000,\"publicationDate\":\"2023-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10202181/pdf/\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Cyborg and bionic systems (Washington, D.C.)\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.34133/cbsystems.0024\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cyborg and bionic systems (Washington, D.C.)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.34133/cbsystems.0024","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
CVT-Based Asynchronous BCI for Brain-Controlled Robot Navigation.
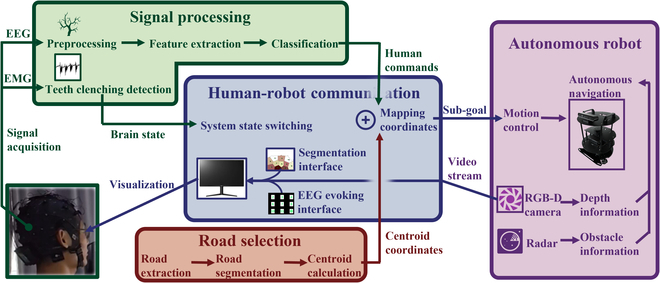
Brain-computer interface (BCI) is a typical direction of integration of human intelligence and robot intelligence. Shared control is an essential form of combining human and robot agents in a common task, but still faces a lack of freedom for the human agent. This paper proposes a Centroidal Voronoi Tessellation (CVT)-based road segmentation approach for brain-controlled robot navigation by means of asynchronous BCI. An electromyogram-based asynchronous mechanism is introduced into the BCI system for self-paced control. A novel CVT-based road segmentation method is provided to generate optional navigation goals in the road area for arbitrary goal selection. An event-related potential of the BCI is designed for target selection to communicate with the robot. The robot has an autonomous navigation function to reach the human selected goals. A comparison experiment in the single-step control pattern is executed to verify the effectiveness of the CVT-based asynchronous (CVT-A) BCI system. Eight subjects participated in the experiment, and they were instructed to control the robot to navigate toward a destination with obstacle avoidance tasks. The results show that the CVT-A BCI system can shorten the task duration, decrease the command times, and optimize navigation path, compared with the single-step pattern. Moreover, this shared control mechanism of the CVT-A BCI system contributes to the promotion of human and robot agent integration control in unstructured environments.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
