CJPS| 北航杨继萍/王志坚教授课题组研究论文:基于液态金属-液晶弹性体复合材料的爬行-翻滚软体机器人
中国高分子
2025-03-20 12:00
文章摘要
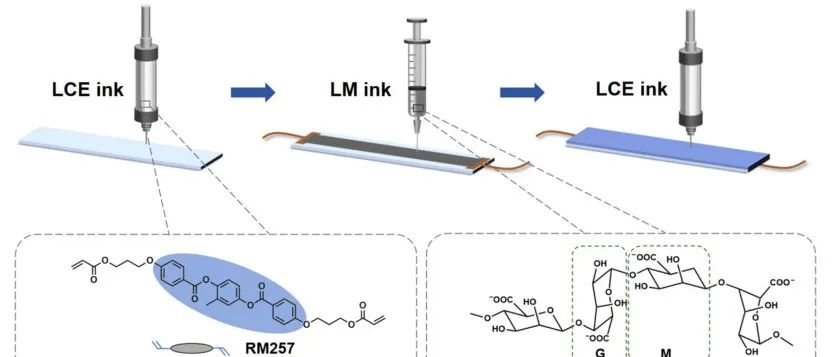
本文介绍了北京航空航天大学杨继萍/王志坚教授课题组的研究成果,他们利用液态金属-液晶弹性体复合材料通过3D打印技术制备了一种新型软驱动器,并开发了具有爬行和翻滚两种运动模式的软体机器人。研究背景基于软机器人在人机交互、野外勘探等领域的应用潜力,以及液晶弹性体作为智能软材料的优势。研究目的是探索不同打印参数对复合材料性能的影响,并设计出能够通过调节输入电压改变运动模式的软体机器人。实验结果表明,通过调节输入电压可以有效控制驱动器的弯曲角度和速度,从而实现机器人的不同运动模式。该研究为软体机器人的设计和应用提供了新的思路和方法。
本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者速来电或来函联系。