Alfonso Parra Rubio, Dixia Fan, Benjamin Jenett, José Del Águila Ferrandis, Filippos Tourlomousis, Amira Abdel-Rahman, David Preiss, Michael Triantafyllou, Neil Gershenfeld
{"title":"Modular Morphing Lattices for Large-Scale Underwater Continuum Robotic Structures.","authors":"Alfonso Parra Rubio, Dixia Fan, Benjamin Jenett, José Del Águila Ferrandis, Filippos Tourlomousis, Amira Abdel-Rahman, David Preiss, Michael Triantafyllou, Neil Gershenfeld","doi":"10.1089/soro.2022.0117","DOIUrl":null,"url":null,"abstract":"<p><p>In this study, we present a method to construct meter-scale deformable structures for underwater robotic applications by discretely assembling mechanical metamaterials. We address the challenge of scaling up nature-like deformable structures while remaining structurally efficient by combining rigid and compliant facets to form custom unit cells that assemble into lattices. The unit cells generate controlled local anisotropies that architect the global deformation of the robotic structure. The resulting flexibility allows better unsteady flow control that enables highly efficient propulsion and optimized force profile manipulations. We demonstrate the utility of this approach in two models. The first is a morphing beam snake-like robot that can generate thrust at specific anguilliform swimming parameters. The second is a morphing surface hydrofoil that, when compared with a rigid wing at the same angles of attack (AoAs), can increase the lift coefficient up to 0.6. In addition, in lower AoAs, the <math><mi>L</mi><mo>∕</mo><mi>D</mi></math> ratio improves by 5 times, whereas in higher angles it improves by 1.25 times. The resulting hydrodynamic performance demonstrates the potential to achieve accessible, scalable, and simple to design and assemble morphing structures for more efficient and effective future ocean exploration and exploitation.</p>","PeriodicalId":48685,"journal":{"name":"Soft Robotics","volume":"10 4","pages":"724-736"},"PeriodicalIF":6.1000,"publicationDate":"2023-08-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10442689/pdf/","citationCount":"2","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Soft Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1089/soro.2022.0117","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 2
Abstract
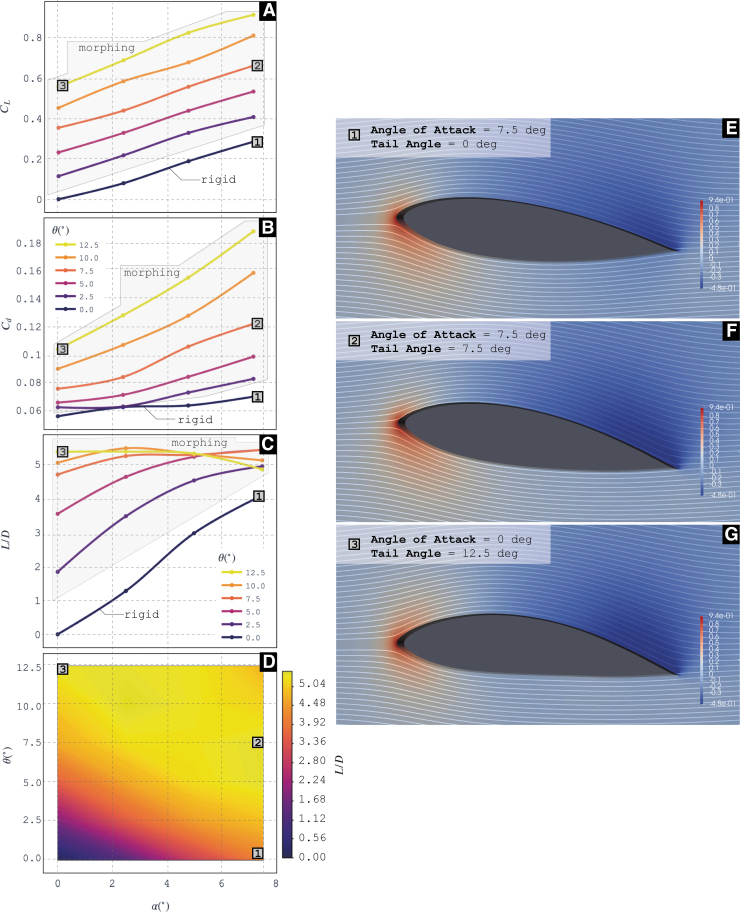
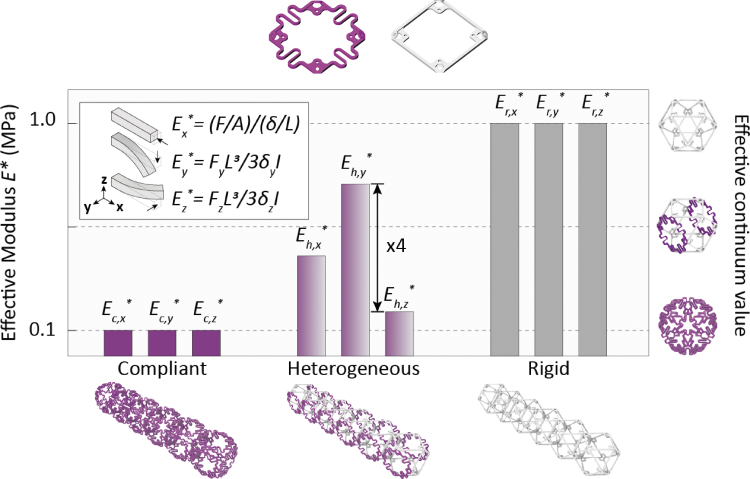
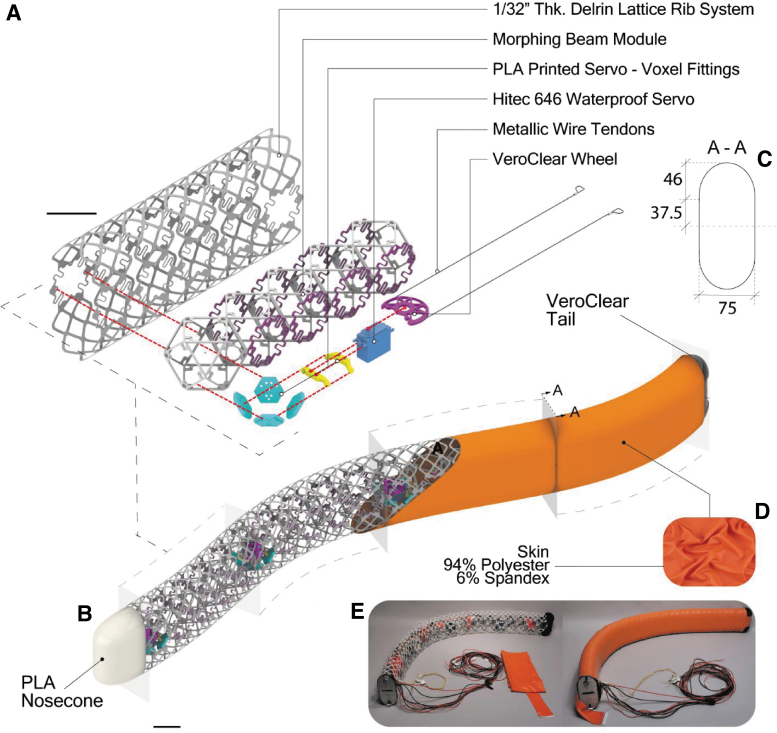
In this study, we present a method to construct meter-scale deformable structures for underwater robotic applications by discretely assembling mechanical metamaterials. We address the challenge of scaling up nature-like deformable structures while remaining structurally efficient by combining rigid and compliant facets to form custom unit cells that assemble into lattices. The unit cells generate controlled local anisotropies that architect the global deformation of the robotic structure. The resulting flexibility allows better unsteady flow control that enables highly efficient propulsion and optimized force profile manipulations. We demonstrate the utility of this approach in two models. The first is a morphing beam snake-like robot that can generate thrust at specific anguilliform swimming parameters. The second is a morphing surface hydrofoil that, when compared with a rigid wing at the same angles of attack (AoAs), can increase the lift coefficient up to 0.6. In addition, in lower AoAs, the ratio improves by 5 times, whereas in higher angles it improves by 1.25 times. The resulting hydrodynamic performance demonstrates the potential to achieve accessible, scalable, and simple to design and assemble morphing structures for more efficient and effective future ocean exploration and exploitation.
期刊介绍:
Soft Robotics (SoRo) stands as a premier robotics journal, showcasing top-tier, peer-reviewed research on the forefront of soft and deformable robotics. Encompassing flexible electronics, materials science, computer science, and biomechanics, it pioneers breakthroughs in robotic technology capable of safe interaction with living systems and navigating complex environments, natural or human-made.
With a multidisciplinary approach, SoRo integrates advancements in biomedical engineering, biomechanics, mathematical modeling, biopolymer chemistry, computer science, and tissue engineering, offering comprehensive insights into constructing adaptable devices that can undergo significant changes in shape and size. This transformative technology finds critical applications in surgery, assistive healthcare devices, emergency search and rescue, space instrument repair, mine detection, and beyond.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
