Marco Rosano, Antonino Furnari, Luigi Gulino, Corrado Santoro, Giovanni Maria Farinella
{"title":"Image-based Navigation in Real-World Environments via Multiple Mid-level Representations: Fusion Models, Benchmark and Efficient Evaluation","authors":"Marco Rosano, Antonino Furnari, Luigi Gulino, Corrado Santoro, Giovanni Maria Farinella","doi":"10.1007/s10514-023-10147-z","DOIUrl":null,"url":null,"abstract":"<div><p>Robot visual navigation is a relevant research topic. Current deep navigation models conveniently learn the navigation policies in simulation, given the large amount of experience they need to collect. Unfortunately, the resulting models show a limited generalization ability when deployed in the real world. In this work we explore solutions to facilitate the development of visual navigation policies trained in simulation that can be successfully transferred in the real world. We first propose an efficient evaluation tool to reproduce realistic navigation episodes in simulation. We then investigate a variety of deep fusion architectures to combine a set of mid-level representations, with the aim of finding the best merge strategy that maximize the real world performances. Our experiments, performed both in simulation and on a robotic platform, show the effectiveness of the considered mid-level representations-based models and confirm the reliability of the evaluation tool. The 3D models of the environment and the code of the validation tool are publicly available at the following link: https://iplab.dmi.unict.it/EmbodiedVN/.\n</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"1483 - 1502"},"PeriodicalIF":4.3000,"publicationDate":"2023-10-26","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10147-z.pdf","citationCount":"2","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10147-z","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 2
Abstract
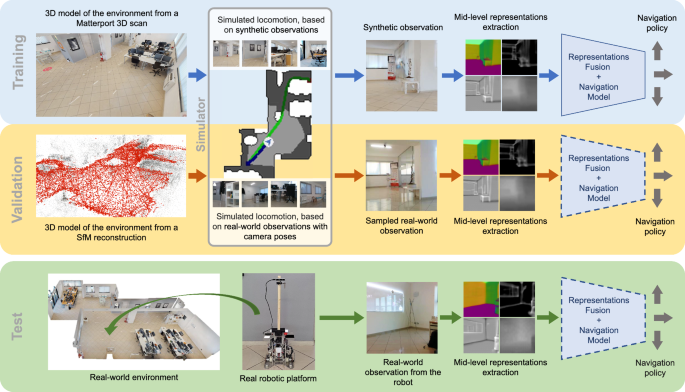
Robot visual navigation is a relevant research topic. Current deep navigation models conveniently learn the navigation policies in simulation, given the large amount of experience they need to collect. Unfortunately, the resulting models show a limited generalization ability when deployed in the real world. In this work we explore solutions to facilitate the development of visual navigation policies trained in simulation that can be successfully transferred in the real world. We first propose an efficient evaluation tool to reproduce realistic navigation episodes in simulation. We then investigate a variety of deep fusion architectures to combine a set of mid-level representations, with the aim of finding the best merge strategy that maximize the real world performances. Our experiments, performed both in simulation and on a robotic platform, show the effectiveness of the considered mid-level representations-based models and confirm the reliability of the evaluation tool. The 3D models of the environment and the code of the validation tool are publicly available at the following link: https://iplab.dmi.unict.it/EmbodiedVN/.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
