Hong Wei, Guangjun Chen, Zhuang Chen, Zhiwei Yu, Jiashuai Huang
{"title":"Progress on Bionic Textured Cutting Tools: A Review and Prospects","authors":"Hong Wei, Guangjun Chen, Zhuang Chen, Zhiwei Yu, Jiashuai Huang","doi":"10.1007/s42235-023-00444-9","DOIUrl":null,"url":null,"abstract":"<div><p>Cutting tools are known as the “productivity” of the manufacturing industry, which affects the production efficiency and quality of the workpiece, and has become the focus of research and attention in academia and industry. However, traditional cutting tools often suffer from adhesion or wear during the cutting process, which considerably reduces the cutting efficiency and service life of the tools, and makes it difficult to meet current production requirements. To solve the above problems, scholars have introduced bionics into the tool’s design, applying the microscopic structure of the biological surface to the tool surface to alleviate the tool’s failure. This paper mainly summarizes the research progress of bionic textured cutting tools. Firstly, categorize whether the bionic texture design is inspired by a single organism or multiple organisms. Secondly, it is discussed that the non-smooth surface of the biological surface has five characteristics: hydrophilic lubricity, wear resistance, drag reduction and hydrophobicity, anti-adhesion, and arrangement, and the non-smooth structure of these different characteristics are applied to the surface of the tool is designed with bionic texture. Furtherly, the cutting performance of bionic textured cutting tools is discussed. The anti-friction and wear-resisting mechanism of bionic textured cutting tools is analyzed. Finally, some pending problems and perspectives have been proposed to provide new inspirations for the design of bionic textured cutting tools.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"21 1","pages":"19 - 55"},"PeriodicalIF":5.8000,"publicationDate":"2023-10-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-023-00444-9","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
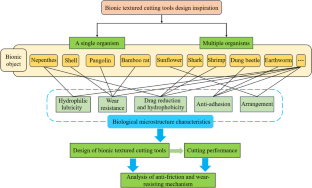
Cutting tools are known as the “productivity” of the manufacturing industry, which affects the production efficiency and quality of the workpiece, and has become the focus of research and attention in academia and industry. However, traditional cutting tools often suffer from adhesion or wear during the cutting process, which considerably reduces the cutting efficiency and service life of the tools, and makes it difficult to meet current production requirements. To solve the above problems, scholars have introduced bionics into the tool’s design, applying the microscopic structure of the biological surface to the tool surface to alleviate the tool’s failure. This paper mainly summarizes the research progress of bionic textured cutting tools. Firstly, categorize whether the bionic texture design is inspired by a single organism or multiple organisms. Secondly, it is discussed that the non-smooth surface of the biological surface has five characteristics: hydrophilic lubricity, wear resistance, drag reduction and hydrophobicity, anti-adhesion, and arrangement, and the non-smooth structure of these different characteristics are applied to the surface of the tool is designed with bionic texture. Furtherly, the cutting performance of bionic textured cutting tools is discussed. The anti-friction and wear-resisting mechanism of bionic textured cutting tools is analyzed. Finally, some pending problems and perspectives have been proposed to provide new inspirations for the design of bionic textured cutting tools.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
