{"title":"UAV-assisted NOMA secure communications: joint transmit power and trajectory optimization","authors":"Ruibo Han, Yongjian Wang, Yang Zhang","doi":"10.1186/s13634-023-01056-5","DOIUrl":null,"url":null,"abstract":"Abstract With the inherent advantages of exceptional maneuverability, flexible deployment options and cost-effectiveness, unmanned aerial vehicles (UAVs) present themselves as a viable solution for providing aerial communication services to Internet of Things devices in high-traffic or remote areas. Nevertheless, the openness of the air–ground channel poses significant security challenges to UAV-based wireless systems. In this paper, a UAV-assisted secure communication system model is established based on non-orthogonal multiple access (NOMA) from the perspective of physical layer security, aiming to conceal the transmission behavior between UAVs and legitimate users (LUs). Specifically, a mobile UAV assumes the role of an aerial base station, leveraging NOMA technique to transmit data to LUs while evading detection from mobile eavesdropper situated on the ground. To fortify the security performance of the system, a hovering UAV acts as a friendly jammer and transmits interference signals to mobile eavesdropper (referred to as Eve). The objective of this scheme is to maximize the minimum average secure rate of all LUs by meticulously optimizing the trajectory and power allocation of the mobile UAV, subject to secrecy performance constraints. The highly interdependent and non-convex nature of this optimization problem renders direct solutions infeasible. Hence, this paper designs an efficient iterative algorithm that decouples the original problem into two subproblems, enabling an alternating optimization process for the trajectory and power allocation of the mobile UAV until the convergence of the objective function is achieved. Simulation results demonstrate that the proposed algorithm effectively improves the minimum average secure rate of all LUs compared with the benchmark scheme.","PeriodicalId":49203,"journal":{"name":"Eurasip Journal on Advances in Signal Processing","volume":"95 1","pages":"0"},"PeriodicalIF":1.9000,"publicationDate":"2023-09-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Eurasip Journal on Advances in Signal Processing","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1186/s13634-023-01056-5","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
Abstract
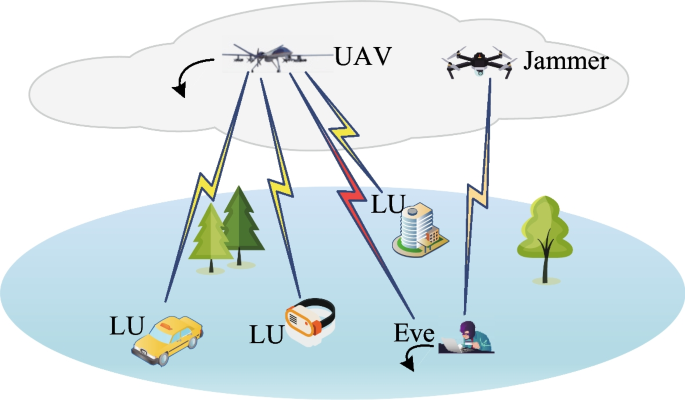
Abstract With the inherent advantages of exceptional maneuverability, flexible deployment options and cost-effectiveness, unmanned aerial vehicles (UAVs) present themselves as a viable solution for providing aerial communication services to Internet of Things devices in high-traffic or remote areas. Nevertheless, the openness of the air–ground channel poses significant security challenges to UAV-based wireless systems. In this paper, a UAV-assisted secure communication system model is established based on non-orthogonal multiple access (NOMA) from the perspective of physical layer security, aiming to conceal the transmission behavior between UAVs and legitimate users (LUs). Specifically, a mobile UAV assumes the role of an aerial base station, leveraging NOMA technique to transmit data to LUs while evading detection from mobile eavesdropper situated on the ground. To fortify the security performance of the system, a hovering UAV acts as a friendly jammer and transmits interference signals to mobile eavesdropper (referred to as Eve). The objective of this scheme is to maximize the minimum average secure rate of all LUs by meticulously optimizing the trajectory and power allocation of the mobile UAV, subject to secrecy performance constraints. The highly interdependent and non-convex nature of this optimization problem renders direct solutions infeasible. Hence, this paper designs an efficient iterative algorithm that decouples the original problem into two subproblems, enabling an alternating optimization process for the trajectory and power allocation of the mobile UAV until the convergence of the objective function is achieved. Simulation results demonstrate that the proposed algorithm effectively improves the minimum average secure rate of all LUs compared with the benchmark scheme.
期刊介绍:
The aim of the EURASIP Journal on Advances in Signal Processing is to highlight the theoretical and practical aspects of signal processing in new and emerging technologies. The journal is directed as much at the practicing engineer as at the academic researcher. Authors of articles with novel contributions to the theory and/or practice of signal processing are welcome to submit their articles for consideration.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
