{"title":"Reinforcement learning for shared autonomy drone landings","authors":"Kal Backman, Dana Kulić, Hoam Chung","doi":"10.1007/s10514-023-10143-3","DOIUrl":null,"url":null,"abstract":"<div><p>Novice pilots find it difficult to operate and land unmanned aerial vehicles (UAVs), due to the complex UAV dynamics, challenges in depth perception, lack of expertise with the control interface and additional disturbances from the ground effect. Therefore we propose a shared autonomy approach to assist pilots in safely landing a UAV under conditions where depth perception is difficult and safe landing zones are limited. Our approach is comprised of two modules: a perception module that encodes information onto a compressed latent representation using two RGB-D cameras and a policy module that is trained with the reinforcement learning algorithm TD3 to discern the pilot’s intent and to provide control inputs that augment the user’s input to safely land the UAV. The policy module is trained in simulation using a population of simulated users. Simulated users are sampled from a parametric model with four parameters, which model a pilot’s tendency to conform to the assistant, proficiency, aggressiveness and speed. We conduct a user study (<span>\\(n=28\\)</span>) where human participants were tasked with landing a physical UAV on one of several platforms under challenging viewing conditions. The assistant, trained with only simulated user data, improved task success rate from 51.4 to 98.2% despite being unaware of the human participants’ goal or the structure of the environment a priori. With the proposed assistant, regardless of prior piloting experience, participants performed with a proficiency greater than the most experienced unassisted participants.\n</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"1419 - 1438"},"PeriodicalIF":4.3000,"publicationDate":"2023-10-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10143-3.pdf","citationCount":"2","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10143-3","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 2
Abstract
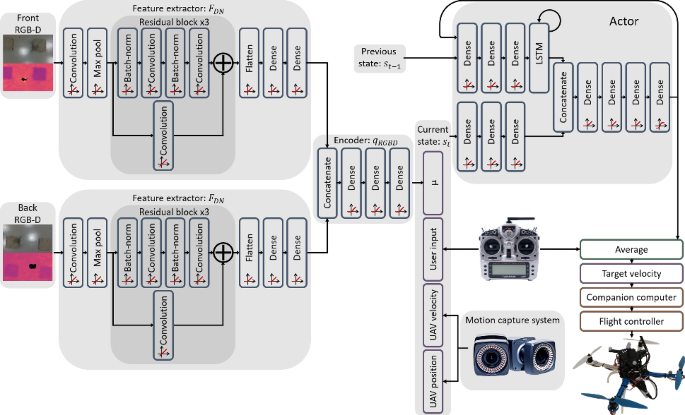
Novice pilots find it difficult to operate and land unmanned aerial vehicles (UAVs), due to the complex UAV dynamics, challenges in depth perception, lack of expertise with the control interface and additional disturbances from the ground effect. Therefore we propose a shared autonomy approach to assist pilots in safely landing a UAV under conditions where depth perception is difficult and safe landing zones are limited. Our approach is comprised of two modules: a perception module that encodes information onto a compressed latent representation using two RGB-D cameras and a policy module that is trained with the reinforcement learning algorithm TD3 to discern the pilot’s intent and to provide control inputs that augment the user’s input to safely land the UAV. The policy module is trained in simulation using a population of simulated users. Simulated users are sampled from a parametric model with four parameters, which model a pilot’s tendency to conform to the assistant, proficiency, aggressiveness and speed. We conduct a user study (\(n=28\)) where human participants were tasked with landing a physical UAV on one of several platforms under challenging viewing conditions. The assistant, trained with only simulated user data, improved task success rate from 51.4 to 98.2% despite being unaware of the human participants’ goal or the structure of the environment a priori. With the proposed assistant, regardless of prior piloting experience, participants performed with a proficiency greater than the most experienced unassisted participants.
由于复杂的无人机动力学,深度感知的挑战,缺乏控制界面的专业知识以及来自地面效应的额外干扰,新手飞行员发现很难操作和降落无人机(UAV)。因此,我们提出了一种共享自主方法来帮助飞行员在深度感知困难和安全着陆区域有限的情况下安全着陆无人机。我们的方法由两个模块组成:一个感知模块,使用两个RGB-D相机将信息编码到压缩的潜在表示中;一个策略模块,使用强化学习算法TD3进行训练,以识别飞行员的意图,并提供控制输入,增加用户的输入以安全降落无人机。策略模块在模拟中使用一组模拟用户进行训练。模拟用户从一个参数模型中抽样,该模型有四个参数,分别模拟飞行员的服从倾向、熟练程度、侵略性和速度。我们进行了一项用户研究(\(n=28\)),其中人类参与者的任务是在具有挑战性的观看条件下将实体无人机降落在几个平台之一上。仅使用模拟用户数据进行训练的助手将任务成功率从51.4提高到98.2% despite being unaware of the human participants’ goal or the structure of the environment a priori. With the proposed assistant, regardless of prior piloting experience, participants performed with a proficiency greater than the most experienced unassisted participants.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
