Christopher Heintz, Sean C. C. Bailey, Jesse B. Hoagg
{"title":"Formation control for autonomous fixed-wing air vehicles with strict speed constraints","authors":"Christopher Heintz, Sean C. C. Bailey, Jesse B. Hoagg","doi":"10.1007/s10514-023-10126-4","DOIUrl":null,"url":null,"abstract":"<div><p>We present a formation-control algorithm for autonomous fixed-wing air vehicles. The desired inter-vehicle positions are time-varying, and we assume that at least one vehicle has access to a measurement its position relative to the leader, which can be a physical or virtual member of the formation. Each vehicle is modeled with extended unicycle dynamics that include orientation kinematics on SO(3), speed dynamics, and strict constraints on speed (i.e., ground speed). The analytic result shows that the vehicles converge exponentially to the desired relative positions with each other and the leader. We also show that each vehicle’s speed satisfies the speed constraints. The formation algorithm is demonstrated in software-in-the-loop (SITL) simulations and experiments with fixed-wing air vehicles. To implement the formation-control algorithm, each vehicle has middle-loop controllers to determine roll, pitch, and throttle commands from the outer-loop formation control. We present SITL simulations with 4 fixed-wing air vehicles that demonstrate formation control with different communication structures. Finally, we present formation-control experiments with up to 3 fixed-wing air vehicles.</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"1299 - 1323"},"PeriodicalIF":4.3000,"publicationDate":"2023-09-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10126-4","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
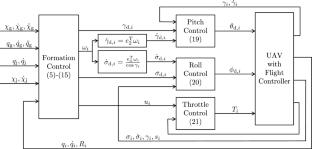
We present a formation-control algorithm for autonomous fixed-wing air vehicles. The desired inter-vehicle positions are time-varying, and we assume that at least one vehicle has access to a measurement its position relative to the leader, which can be a physical or virtual member of the formation. Each vehicle is modeled with extended unicycle dynamics that include orientation kinematics on SO(3), speed dynamics, and strict constraints on speed (i.e., ground speed). The analytic result shows that the vehicles converge exponentially to the desired relative positions with each other and the leader. We also show that each vehicle’s speed satisfies the speed constraints. The formation algorithm is demonstrated in software-in-the-loop (SITL) simulations and experiments with fixed-wing air vehicles. To implement the formation-control algorithm, each vehicle has middle-loop controllers to determine roll, pitch, and throttle commands from the outer-loop formation control. We present SITL simulations with 4 fixed-wing air vehicles that demonstrate formation control with different communication structures. Finally, we present formation-control experiments with up to 3 fixed-wing air vehicles.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
