{"title":"Domain adaptive semantic segmentation by optimal transport","authors":"","doi":"10.1016/j.fmre.2023.06.006","DOIUrl":null,"url":null,"abstract":"<div><div>Scene segmentation is widely used in autonomous driving for environmental perception. Semantic scene segmentation has gained considerable attention owing to its rich semantic information. It assigns labels to the pixels in an image, thereby enabling automatic image labeling. Current approaches are based mainly on convolutional neural networks (CNN), however, they rely on numerous labels. Therefore, the use of a small amount of labeled data to achieve semantic segmentation has become increasingly important. In this study, we developed a domain adaptation framework based on optimal transport (OT) and an attention mechanism to address this issue. Specifically, we first generated the output space via a CNN owing to its superior of feature representation. Second, we utilized OT to achieve a more robust alignment of the source and target domains in the output space, where the OT plan defined a well attention mechanism to improve the adaptation of the model. In particular, the OT reduced the number of network parameters and made the network more interpretable. Third, to better describe the multiscale properties of the features, we constructed a multiscale segmentation network to perform domain adaptation. Finally, to verify the performance of the proposed method, we conducted an experiment to compare the proposed method with three benchmark and four SOTA methods using three scene datasets. The mean intersection-over-union (mIOU) was significantly improved, and visualization results under multiple domain adaptation scenarios also show that the proposed method performed better than semantic segmentation methods.</div></div>","PeriodicalId":34602,"journal":{"name":"Fundamental Research","volume":"4 5","pages":"Pages 981-991"},"PeriodicalIF":6.3000,"publicationDate":"2024-09-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Fundamental Research","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2667325823001899","RegionNum":3,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"Multidisciplinary","Score":null,"Total":0}
引用次数: 0
Abstract
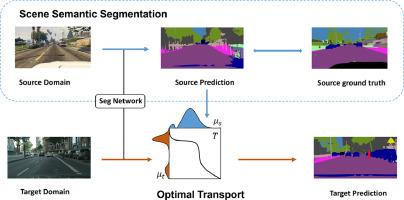
Scene segmentation is widely used in autonomous driving for environmental perception. Semantic scene segmentation has gained considerable attention owing to its rich semantic information. It assigns labels to the pixels in an image, thereby enabling automatic image labeling. Current approaches are based mainly on convolutional neural networks (CNN), however, they rely on numerous labels. Therefore, the use of a small amount of labeled data to achieve semantic segmentation has become increasingly important. In this study, we developed a domain adaptation framework based on optimal transport (OT) and an attention mechanism to address this issue. Specifically, we first generated the output space via a CNN owing to its superior of feature representation. Second, we utilized OT to achieve a more robust alignment of the source and target domains in the output space, where the OT plan defined a well attention mechanism to improve the adaptation of the model. In particular, the OT reduced the number of network parameters and made the network more interpretable. Third, to better describe the multiscale properties of the features, we constructed a multiscale segmentation network to perform domain adaptation. Finally, to verify the performance of the proposed method, we conducted an experiment to compare the proposed method with three benchmark and four SOTA methods using three scene datasets. The mean intersection-over-union (mIOU) was significantly improved, and visualization results under multiple domain adaptation scenarios also show that the proposed method performed better than semantic segmentation methods.
场景分割被广泛应用于自动驾驶的环境感知。语义场景分割因其丰富的语义信息而备受关注。它为图像中的像素分配标签,从而实现自动图像标注。目前的方法主要基于卷积神经网络(CNN),但它们依赖于大量的标签。因此,使用少量标签数据实现语义分割变得越来越重要。在本研究中,我们开发了一个基于最优传输(OT)和注意力机制的领域适应框架来解决这一问题。具体来说,由于 CNN 在特征表示方面的优势,我们首先通过 CNN 生成输出空间。其次,我们利用 OT 在输出空间中实现源域和目标域更稳健的对齐,其中 OT 计划定义了一种良好的注意力机制,以改善模型的适应性。特别是,OT 减少了网络参数的数量,使网络更具可解释性。第三,为了更好地描述特征的多尺度特性,我们构建了一个多尺度分割网络来执行域自适应。最后,为了验证所提方法的性能,我们使用三个场景数据集进行了实验,将所提方法与三种基准方法和四种 SOTA 方法进行了比较。结果表明,提出的方法显著提高了平均交集重合度(mIOU),多域自适应场景下的可视化结果也表明,提出的方法比语义分割方法表现更好。



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
