{"title":"The methods of task pre-allocation and reallocation for multi-UAV cooperative reconnaissance mission","authors":"Gang Wang, Xiao Lv, Liangzhong Cui, Xiaohu Yan","doi":"10.1049/cim2.12090","DOIUrl":null,"url":null,"abstract":"<p>Nowadays, multi unmanned aerial vehicle (multi-UAV) systems have been widely used in battlefield. The rationality of mission plan can directly affect the effectiveness of multi-UAV system. The existing multi-UAV task allocation model lack a comprehensive modelling of task pre-allocation and task reallocation issues. However, in actual task execution, task pre-allocation and task reallocation are a holistic problem. Therefore, based on the background of multi-UAV cooperative reconnaissance, the authors establish a multi-UAV cooperative reconnaissance task pre-allocation and reallocation model (MCRTPR). There are two kinds of task allocation in MCRTPR model. One is task pre-allocation, which is a static task allocation before the mission begin. Another is task reallocation, that is a dynamic task allocation during the mission. For task pre-allocation, a particle swarm optimisation algorithm based on experience pool (EPPSO) is proposed. And for task reallocation, the authors design a partial task reallocation algorithm based on contract network protocol (CNP-PTR). The experimental results show that, compared with some state-of-the-art algorithms, EPPSO can get the lowest fitness value under various experimental conditions, and CNP-PTR is able to handle task reallocation problem caused by multiple kinds of dynamic events.</p>","PeriodicalId":33286,"journal":{"name":"IET Collaborative Intelligent Manufacturing","volume":"5 4","pages":""},"PeriodicalIF":3.1000,"publicationDate":"2023-12-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ietresearch.onlinelibrary.wiley.com/doi/epdf/10.1049/cim2.12090","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Collaborative Intelligent Manufacturing","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/cim2.12090","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, INDUSTRIAL","Score":null,"Total":0}
引用次数: 0
Abstract
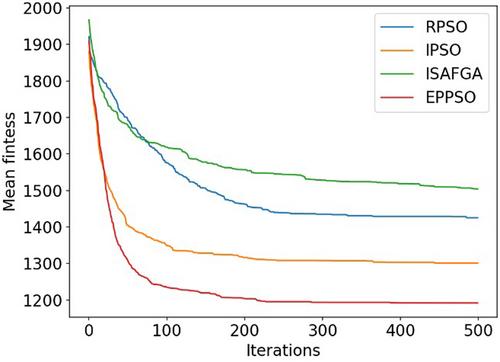
Nowadays, multi unmanned aerial vehicle (multi-UAV) systems have been widely used in battlefield. The rationality of mission plan can directly affect the effectiveness of multi-UAV system. The existing multi-UAV task allocation model lack a comprehensive modelling of task pre-allocation and task reallocation issues. However, in actual task execution, task pre-allocation and task reallocation are a holistic problem. Therefore, based on the background of multi-UAV cooperative reconnaissance, the authors establish a multi-UAV cooperative reconnaissance task pre-allocation and reallocation model (MCRTPR). There are two kinds of task allocation in MCRTPR model. One is task pre-allocation, which is a static task allocation before the mission begin. Another is task reallocation, that is a dynamic task allocation during the mission. For task pre-allocation, a particle swarm optimisation algorithm based on experience pool (EPPSO) is proposed. And for task reallocation, the authors design a partial task reallocation algorithm based on contract network protocol (CNP-PTR). The experimental results show that, compared with some state-of-the-art algorithms, EPPSO can get the lowest fitness value under various experimental conditions, and CNP-PTR is able to handle task reallocation problem caused by multiple kinds of dynamic events.
期刊介绍:
IET Collaborative Intelligent Manufacturing is a Gold Open Access journal that focuses on the development of efficient and adaptive production and distribution systems. It aims to meet the ever-changing market demands by publishing original research on methodologies and techniques for the application of intelligence, data science, and emerging information and communication technologies in various aspects of manufacturing, such as design, modeling, simulation, planning, and optimization of products, processes, production, and assembly.
The journal is indexed in COMPENDEX (Elsevier), Directory of Open Access Journals (DOAJ), Emerging Sources Citation Index (Clarivate Analytics), INSPEC (IET), SCOPUS (Elsevier) and Web of Science (Clarivate Analytics).



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
