Fabian Jenelten, Junzhe He, Farbod Farshidian, Marco Hutter
{"title":"DTC: Deep Tracking Control","authors":"Fabian Jenelten, Junzhe He, Farbod Farshidian, Marco Hutter","doi":"10.1126/scirobotics.adh5401","DOIUrl":null,"url":null,"abstract":"<div >Legged locomotion is a complex control problem that requires both accuracy and robustness to cope with real-world challenges. Legged systems have traditionally been controlled using trajectory optimization with inverse dynamics. Such hierarchical model-based methods are appealing because of intuitive cost function tuning, accurate planning, generalization, and, most importantly, the insightful understanding gained from more than one decade of extensive research. However, model mismatch and violation of assumptions are common sources of faulty operation. Simulation-based reinforcement learning, on the other hand, results in locomotion policies with unprecedented robustness and recovery skills. Yet, all learning algorithms struggle with sparse rewards emerging from environments where valid footholds are rare, such as gaps or stepping stones. In this work, we propose a hybrid control architecture that combines the advantages of both worlds to simultaneously achieve greater robustness, foot-placement accuracy, and terrain generalization. Our approach uses a model-based planner to roll out a reference motion during training. A deep neural network policy is trained in simulation, aiming to track the optimized footholds. We evaluated the accuracy of our locomotion pipeline on sparse terrains, where pure data-driven methods are prone to fail. Furthermore, we demonstrate superior robustness in the presence of slippery or deformable ground when compared with model-based counterparts. Last, we show that our proposed tracking controller generalizes across different trajectory optimization methods not seen during training. In conclusion, our work unites the predictive capabilities and optimality guarantees of online planning with the inherent robustness attributed to offline learning.</div>","PeriodicalId":56029,"journal":{"name":"Science Robotics","volume":"9 86","pages":""},"PeriodicalIF":27.5000,"publicationDate":"2024-01-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.science.org/doi/reader/10.1126/scirobotics.adh5401","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science Robotics","FirstCategoryId":"94","ListUrlMain":"https://www.science.org/doi/10.1126/scirobotics.adh5401","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
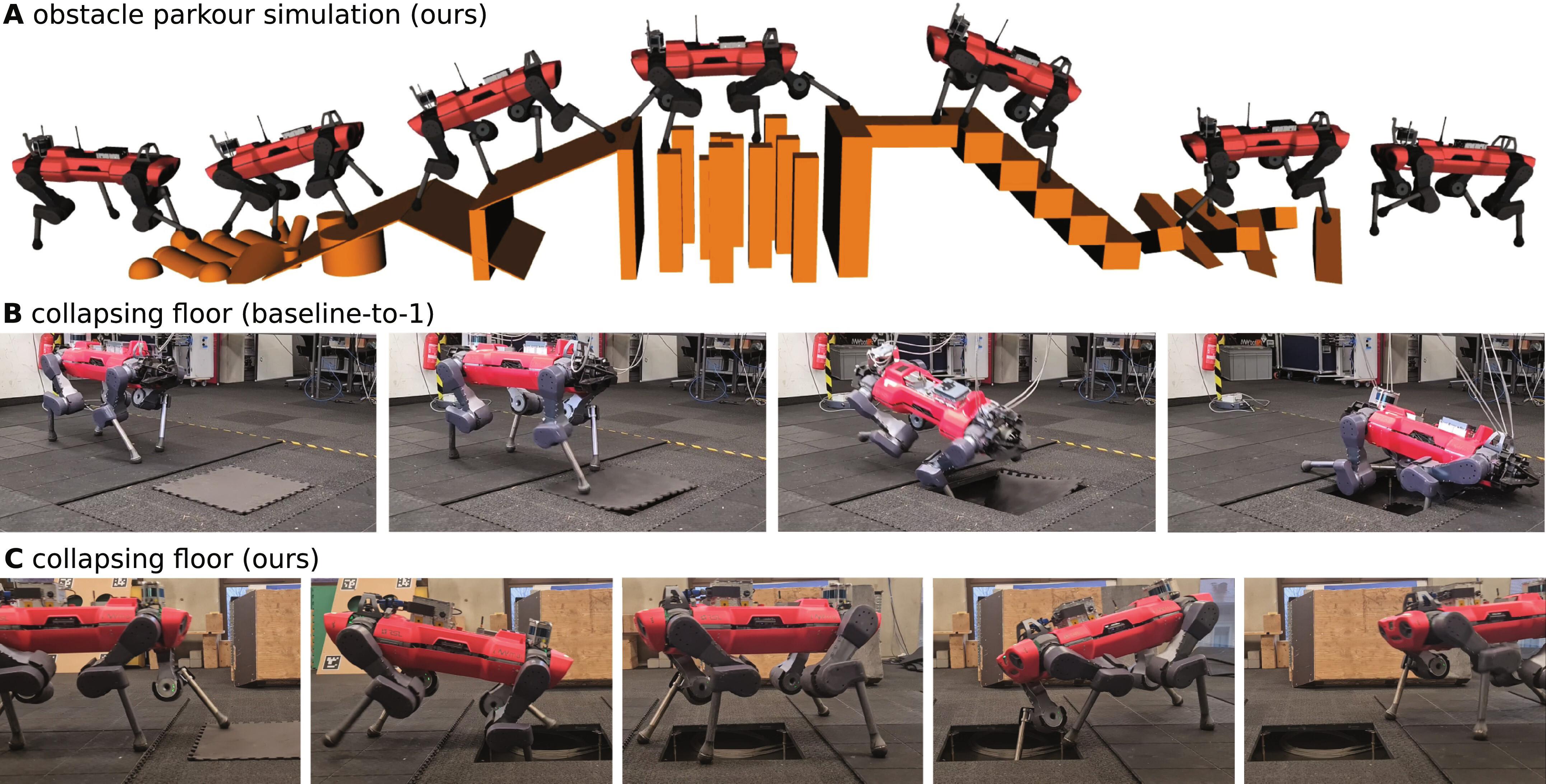
Legged locomotion is a complex control problem that requires both accuracy and robustness to cope with real-world challenges. Legged systems have traditionally been controlled using trajectory optimization with inverse dynamics. Such hierarchical model-based methods are appealing because of intuitive cost function tuning, accurate planning, generalization, and, most importantly, the insightful understanding gained from more than one decade of extensive research. However, model mismatch and violation of assumptions are common sources of faulty operation. Simulation-based reinforcement learning, on the other hand, results in locomotion policies with unprecedented robustness and recovery skills. Yet, all learning algorithms struggle with sparse rewards emerging from environments where valid footholds are rare, such as gaps or stepping stones. In this work, we propose a hybrid control architecture that combines the advantages of both worlds to simultaneously achieve greater robustness, foot-placement accuracy, and terrain generalization. Our approach uses a model-based planner to roll out a reference motion during training. A deep neural network policy is trained in simulation, aiming to track the optimized footholds. We evaluated the accuracy of our locomotion pipeline on sparse terrains, where pure data-driven methods are prone to fail. Furthermore, we demonstrate superior robustness in the presence of slippery or deformable ground when compared with model-based counterparts. Last, we show that our proposed tracking controller generalizes across different trajectory optimization methods not seen during training. In conclusion, our work unites the predictive capabilities and optimality guarantees of online planning with the inherent robustness attributed to offline learning.
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
