{"title":"Elevating adaptive traffic signal control in semi-autonomous traffic dynamics by using connected and automated vehicles as probes","authors":"Yurong Li, Liqun Peng","doi":"10.1049/itr2.12483","DOIUrl":null,"url":null,"abstract":"<p>In this work, the connected vehicle's messages are used to create an enhanced adaptive traffic signal control (ATSC) system for improved traffic flow. Few existing studies use connected and automated vehicles (CAVs) to develop traffic signal control algorithms under hybrid connected and autonomous conditions. The proposed approach focuses on a four-phase traffic intersection with both CAVs and human-driven vehicles (HVs). CAVs share real-time state information, and a model called Roads Dynamic Segmentation estimates queuing procedures and vehicle fleet numbers on dynamic road sections. This information is used in the Store and Forward Model (SFM) to predict intersection queuing length. The ATSC system, based on model predictive control (MPC), aims to minimize intersection queue length while considering traffic constraints (undersaturated, saturated, and oversaturated) and avoiding free-flow problems due to queue overflow. To reduce computational complexity, a linear-quadratic-regulator (LQR) is used. Real-world vehicle trajectories and the SUMO tool are used for experimental purposes. Results show that the proposed method reduces average delay by 38.50% and 33.42% compared to fixed timing and traditional MPC in cases of oversaturated traffic flow with 100% CAV penetration. Even with a penetration rate of only 20%, average delay decreases by 13.65% and 6.50%, respectively. This study showcases not only the potential benefits of CAV in enhancing traffic, but also enables the optimal utilization of green duration in signalized intersection control systems. This helps prevent traffic congestion and ensures the efficient and smooth movement of traffic flow.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 6","pages":"1016-1030"},"PeriodicalIF":2.3000,"publicationDate":"2024-01-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12483","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12483","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
Abstract
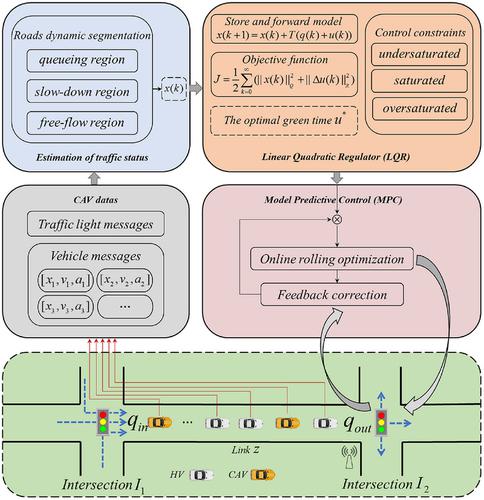
In this work, the connected vehicle's messages are used to create an enhanced adaptive traffic signal control (ATSC) system for improved traffic flow. Few existing studies use connected and automated vehicles (CAVs) to develop traffic signal control algorithms under hybrid connected and autonomous conditions. The proposed approach focuses on a four-phase traffic intersection with both CAVs and human-driven vehicles (HVs). CAVs share real-time state information, and a model called Roads Dynamic Segmentation estimates queuing procedures and vehicle fleet numbers on dynamic road sections. This information is used in the Store and Forward Model (SFM) to predict intersection queuing length. The ATSC system, based on model predictive control (MPC), aims to minimize intersection queue length while considering traffic constraints (undersaturated, saturated, and oversaturated) and avoiding free-flow problems due to queue overflow. To reduce computational complexity, a linear-quadratic-regulator (LQR) is used. Real-world vehicle trajectories and the SUMO tool are used for experimental purposes. Results show that the proposed method reduces average delay by 38.50% and 33.42% compared to fixed timing and traditional MPC in cases of oversaturated traffic flow with 100% CAV penetration. Even with a penetration rate of only 20%, average delay decreases by 13.65% and 6.50%, respectively. This study showcases not only the potential benefits of CAV in enhancing traffic, but also enables the optimal utilization of green duration in signalized intersection control systems. This helps prevent traffic congestion and ensures the efficient and smooth movement of traffic flow.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
