S. Conrad, J. Teichmann, P. Auth, N. Knorr, K. Ulrich, D. Bellin, T. Speck, F. J. Tauber
{"title":"3D-printed digital pneumatic logic for the control of soft robotic actuators","authors":"S. Conrad, J. Teichmann, P. Auth, N. Knorr, K. Ulrich, D. Bellin, T. Speck, F. J. Tauber","doi":"10.1126/scirobotics.adh4060","DOIUrl":null,"url":null,"abstract":"<div >Soft robots are paving their way to catch up with the application range of metal-based machines and to occupy fields that are challenging for traditional machines. Pneumatic actuators play an important role in this development, allowing the construction of bioinspired motion systems. Pneumatic logic gates provide a powerful alternative for controlling pressure-activated soft robots, which are often controlled by metallic valves and electric circuits. Many existing approaches for fully compliant pneumatic control logic suffer from high manual effort and low pressure tolerance. In our work, we invented three-dimensional (3D) printable, pneumatic logic gates that perform Boolean operations and imitate electric circuits. Within 7 hours, a filament printer is able to produce a module that serves as an OR, AND, or NOT gate; the logic function is defined by the assigned input signals. The gate contains two alternately acting pneumatic valves, whose work principle is based on the interaction of pressurized chambers and a 3D-printed 1-millimeter tube inside. The gate design does not require any kind of support material for its hollow parts, which makes the modules ready to use directly after printing. Depending on the chosen material, the modules can operate on a pressure supply between 80 and more than 750 kilopascals. The capabilities of the invented gates were verified by implementing an electronics-free drink dispenser based on a pneumatic ring oscillator and a 1-bit memory. Their high compliance is demonstrated by driving a car over a fully flexible, 3D-printed robotic walker controlled by an integrated circuit.</div>","PeriodicalId":56029,"journal":{"name":"Science Robotics","volume":"9 86","pages":""},"PeriodicalIF":27.5000,"publicationDate":"2024-01-31","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.science.org/doi/reader/10.1126/scirobotics.adh4060","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science Robotics","FirstCategoryId":"94","ListUrlMain":"https://www.science.org/doi/10.1126/scirobotics.adh4060","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
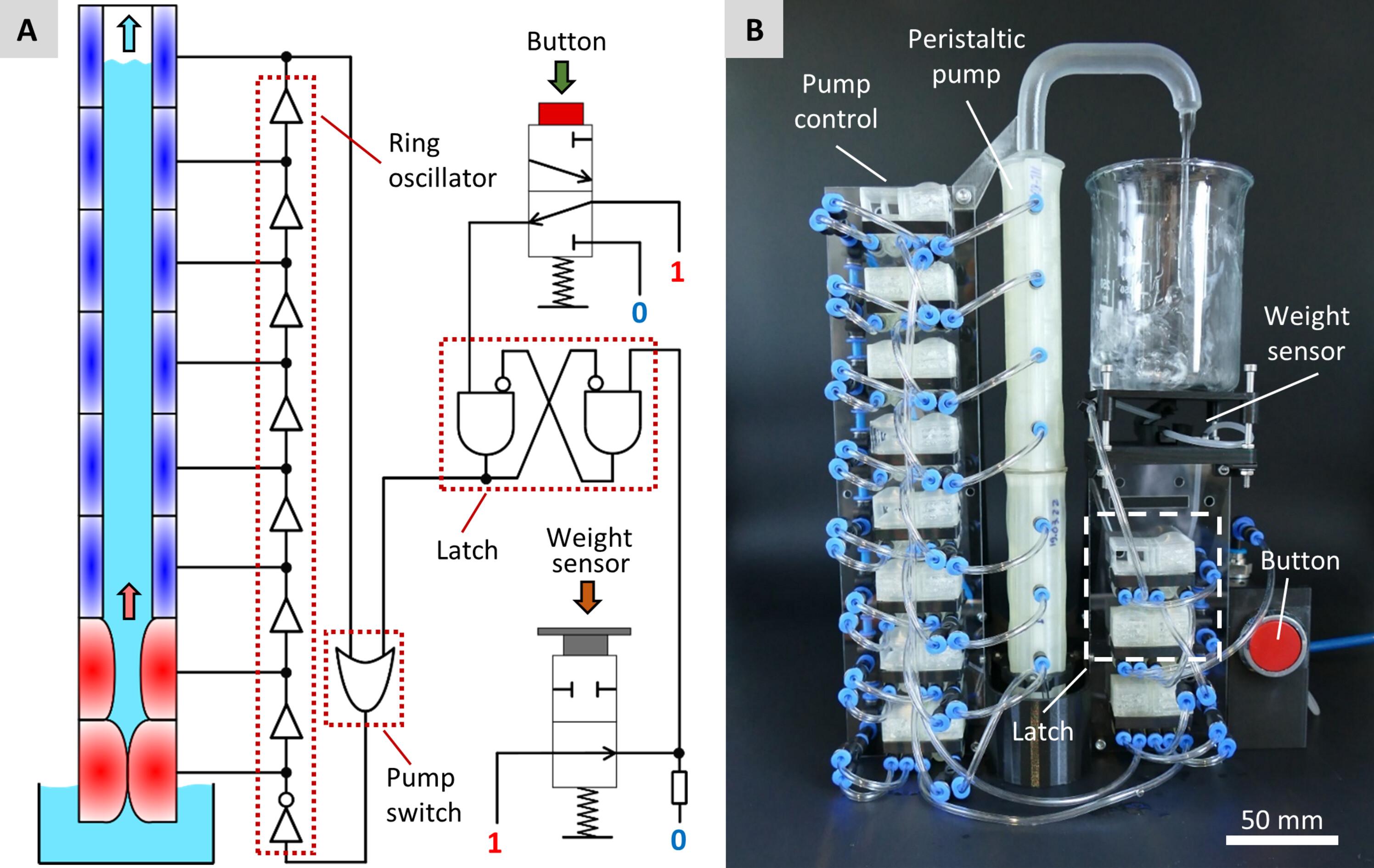
Soft robots are paving their way to catch up with the application range of metal-based machines and to occupy fields that are challenging for traditional machines. Pneumatic actuators play an important role in this development, allowing the construction of bioinspired motion systems. Pneumatic logic gates provide a powerful alternative for controlling pressure-activated soft robots, which are often controlled by metallic valves and electric circuits. Many existing approaches for fully compliant pneumatic control logic suffer from high manual effort and low pressure tolerance. In our work, we invented three-dimensional (3D) printable, pneumatic logic gates that perform Boolean operations and imitate electric circuits. Within 7 hours, a filament printer is able to produce a module that serves as an OR, AND, or NOT gate; the logic function is defined by the assigned input signals. The gate contains two alternately acting pneumatic valves, whose work principle is based on the interaction of pressurized chambers and a 3D-printed 1-millimeter tube inside. The gate design does not require any kind of support material for its hollow parts, which makes the modules ready to use directly after printing. Depending on the chosen material, the modules can operate on a pressure supply between 80 and more than 750 kilopascals. The capabilities of the invented gates were verified by implementing an electronics-free drink dispenser based on a pneumatic ring oscillator and a 1-bit memory. Their high compliance is demonstrated by driving a car over a fully flexible, 3D-printed robotic walker controlled by an integrated circuit.
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
