{"title":"Research on trajectory planning algorithm of manipulator based on visual servo","authors":"Xuan Wang, Hua Yu, Shu Niu, Shuai Li","doi":"10.1002/adc2.186","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Background</h3>\n \n <p>With the development and progress of society, not only substations, but also various industries are moving towards automation, intelligence, and unmanned direction. There is an increasing need for machinery to replace human activities. However, how to improve the ability of robotic arms to cope with various working environments and emergencies, and develop real-time, high-speed, and accurate trajectory planning algorithms has become a hot topic of discussion.</p>\n </section>\n \n <section>\n \n <h3> Purpose</h3>\n \n <p>In order to develop a reasonable trajectory planning algorithm for robotic arms, this article studies the trajectory planning algorithm of robotic arms based on visual servoing, in order to improve the trajectory operation ability of robotic arms.</p>\n </section>\n \n <section>\n \n <h3> Method</h3>\n \n <p>The feasibility of the algorithm was tested through experiments.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>It was found that the angle, angular velocity, and angular acceleration curves of both the second and fifth sixth joints of the robotic arm were very smooth, and there were no problems such as faults.</p>\n </section>\n \n <section>\n \n <h3> Conclusion</h3>\n \n <p>This confirms the effectiveness of the algorithm's operation, which can assist the robotic arm in safe, accurate, and efficient operations on the basis of visual servoing.</p>\n </section>\n </div>","PeriodicalId":100030,"journal":{"name":"Advanced Control for Applications","volume":"6 1","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2024-01-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/adc2.186","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Control for Applications","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/adc2.186","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
Background
With the development and progress of society, not only substations, but also various industries are moving towards automation, intelligence, and unmanned direction. There is an increasing need for machinery to replace human activities. However, how to improve the ability of robotic arms to cope with various working environments and emergencies, and develop real-time, high-speed, and accurate trajectory planning algorithms has become a hot topic of discussion.
Purpose
In order to develop a reasonable trajectory planning algorithm for robotic arms, this article studies the trajectory planning algorithm of robotic arms based on visual servoing, in order to improve the trajectory operation ability of robotic arms.
Method
The feasibility of the algorithm was tested through experiments.
Results
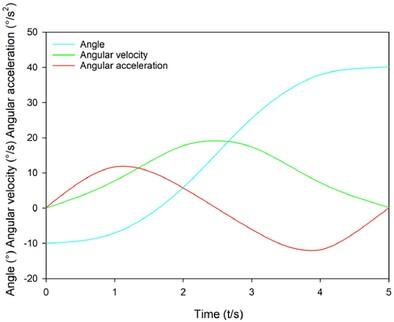
It was found that the angle, angular velocity, and angular acceleration curves of both the second and fifth sixth joints of the robotic arm were very smooth, and there were no problems such as faults.
Conclusion
This confirms the effectiveness of the algorithm's operation, which can assist the robotic arm in safe, accurate, and efficient operations on the basis of visual servoing.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
