{"title":"Elastic energy-recycling actuators for efficient robots","authors":"Erez Krimsky, Steven H. Collins","doi":"10.1126/scirobotics.adj7246","DOIUrl":null,"url":null,"abstract":"<div >Electric motors are widely used in robots but waste energy in many applications. We introduce an elastic energy-recycling actuator that maintains the versatility of motors while improving energy efficiency in cyclic tasks. The actuator comprises a motor in parallel with an array of springs that can be individually engaged and disengaged, while retaining stored energy, by pairs of low-power electroadhesive clutches. We developed a prototype actuator and tested it in five repetitive tasks with features common in robotic applications but difficult to perform efficiently. The actuator reduced power consumption by at least 50% in all cases and by 97% in the best case. Elastic energy recovery, controlled by low-power clutches, can improve the efficiency of mobile robots, assistive devices, and other engineered systems.</div>","PeriodicalId":56029,"journal":{"name":"Science Robotics","volume":"9 88","pages":""},"PeriodicalIF":27.5000,"publicationDate":"2024-03-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.science.org/doi/reader/10.1126/scirobotics.adj7246","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science Robotics","FirstCategoryId":"94","ListUrlMain":"https://www.science.org/doi/10.1126/scirobotics.adj7246","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
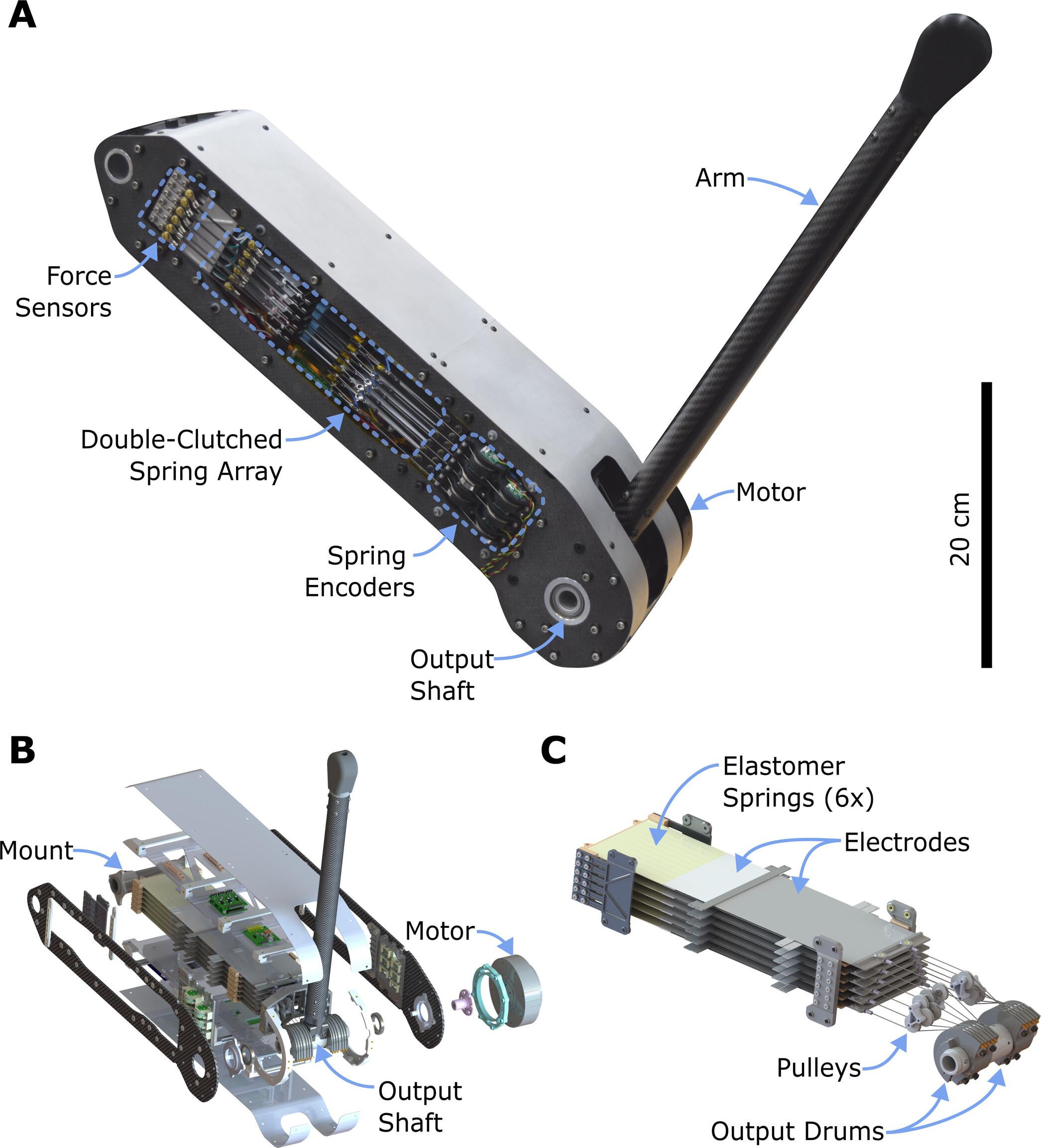
Electric motors are widely used in robots but waste energy in many applications. We introduce an elastic energy-recycling actuator that maintains the versatility of motors while improving energy efficiency in cyclic tasks. The actuator comprises a motor in parallel with an array of springs that can be individually engaged and disengaged, while retaining stored energy, by pairs of low-power electroadhesive clutches. We developed a prototype actuator and tested it in five repetitive tasks with features common in robotic applications but difficult to perform efficiently. The actuator reduced power consumption by at least 50% in all cases and by 97% in the best case. Elastic energy recovery, controlled by low-power clutches, can improve the efficiency of mobile robots, assistive devices, and other engineered systems.
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
