{"title":"AGV monocular vision localization algorithm based on Gaussian saliency heuristic","authors":"Heng Fu, Yakai Hu, Shuhua Zhao, Jianxin Zhu, Benxue Liu, Zhen Yang","doi":"10.1186/s13634-024-01112-8","DOIUrl":null,"url":null,"abstract":"<p>To address the issues of poor detection accuracy and the large number of target detection model parameters in existing AGV monocular vision location detection algorithms, this paper presents an AGV vision location method based on Gaussian saliency heuristic. The proposed method introduces a fast and accurate AGV visual detection network called GAGV-net. In the GAGV-net network, a Gaussian saliency feature extraction module is designed to enhance the network’s feature extraction capability, thereby reducing the required output for model fitting. To improve the accuracy of target detection, a joint multi-scale classification and detection task header are designed at the stage of target frame regression to classification. This header utilizes target features of different scales, thereby enhancing the accuracy of target detection. Experimental results demonstrate a 12% improvement in detection accuracy and a 27.38 FPS increase in detection speed compared to existing detection methods. Moreover, the proposed detection network significantly reduces the model’s size, enhances the network model’s deployability on AGVs, and greatly improves detection accuracy.</p>","PeriodicalId":11816,"journal":{"name":"EURASIP Journal on Advances in Signal Processing","volume":"31 1","pages":""},"PeriodicalIF":1.9000,"publicationDate":"2024-03-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"EURASIP Journal on Advances in Signal Processing","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1186/s13634-024-01112-8","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"Engineering","Score":null,"Total":0}
引用次数: 0
Abstract
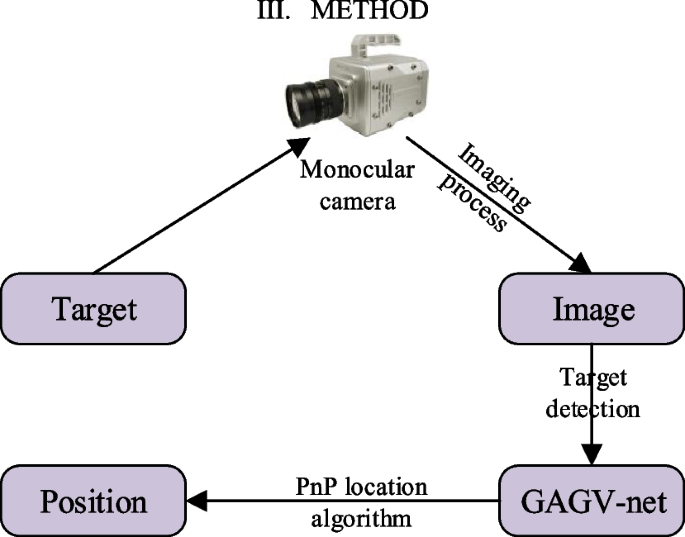
To address the issues of poor detection accuracy and the large number of target detection model parameters in existing AGV monocular vision location detection algorithms, this paper presents an AGV vision location method based on Gaussian saliency heuristic. The proposed method introduces a fast and accurate AGV visual detection network called GAGV-net. In the GAGV-net network, a Gaussian saliency feature extraction module is designed to enhance the network’s feature extraction capability, thereby reducing the required output for model fitting. To improve the accuracy of target detection, a joint multi-scale classification and detection task header are designed at the stage of target frame regression to classification. This header utilizes target features of different scales, thereby enhancing the accuracy of target detection. Experimental results demonstrate a 12% improvement in detection accuracy and a 27.38 FPS increase in detection speed compared to existing detection methods. Moreover, the proposed detection network significantly reduces the model’s size, enhances the network model’s deployability on AGVs, and greatly improves detection accuracy.
期刊介绍:
The aim of the EURASIP Journal on Advances in Signal Processing is to highlight the theoretical and practical aspects of signal processing in new and emerging technologies. The journal is directed as much at the practicing engineer as at the academic researcher. Authors of articles with novel contributions to the theory and/or practice of signal processing are welcome to submit their articles for consideration.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
