{"title":"Human-robot facial coexpression","authors":"Yuhang Hu, Boyuan Chen, Jiong Lin, Yunzhe Wang, Yingke Wang, Cameron Mehlman, Hod Lipson","doi":"10.1126/scirobotics.adi4724","DOIUrl":null,"url":null,"abstract":"<div >Large language models are enabling rapid progress in robotic verbal communication, but nonverbal communication is not keeping pace. Physical humanoid robots struggle to express and communicate using facial movement, relying primarily on voice. The challenge is twofold: First, the actuation of an expressively versatile robotic face is mechanically challenging. A second challenge is knowing what expression to generate so that the robot appears natural, timely, and genuine. Here, we propose that both barriers can be alleviated by training a robot to anticipate future facial expressions and execute them simultaneously with a human. Whereas delayed facial mimicry looks disingenuous, facial coexpression feels more genuine because it requires correct inference of the human’s emotional state for timely execution. We found that a robot can learn to predict a forthcoming smile about 839 milliseconds before the human smiles and, using a learned inverse kinematic facial self-model, coexpress the smile simultaneously with the human. We demonstrated this ability using a robot face comprising 26 degrees of freedom. We believe that the ability to coexpress simultaneous facial expressions could improve human-robot interaction.</div>","PeriodicalId":56029,"journal":{"name":"Science Robotics","volume":"9 88","pages":""},"PeriodicalIF":27.5000,"publicationDate":"2024-03-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.science.org/doi/reader/10.1126/scirobotics.adi4724","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science Robotics","FirstCategoryId":"94","ListUrlMain":"https://www.science.org/doi/10.1126/scirobotics.adi4724","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
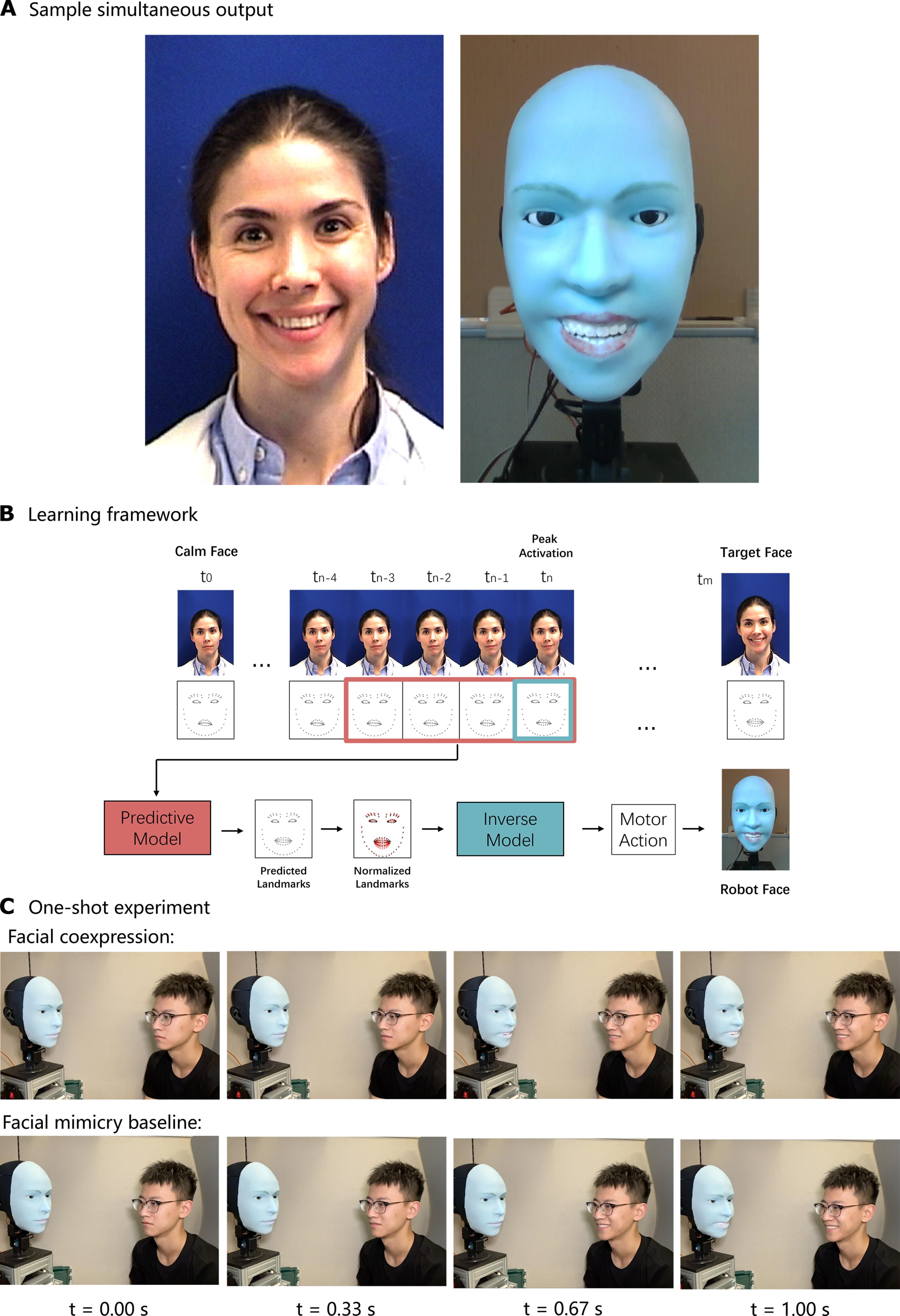
Large language models are enabling rapid progress in robotic verbal communication, but nonverbal communication is not keeping pace. Physical humanoid robots struggle to express and communicate using facial movement, relying primarily on voice. The challenge is twofold: First, the actuation of an expressively versatile robotic face is mechanically challenging. A second challenge is knowing what expression to generate so that the robot appears natural, timely, and genuine. Here, we propose that both barriers can be alleviated by training a robot to anticipate future facial expressions and execute them simultaneously with a human. Whereas delayed facial mimicry looks disingenuous, facial coexpression feels more genuine because it requires correct inference of the human’s emotional state for timely execution. We found that a robot can learn to predict a forthcoming smile about 839 milliseconds before the human smiles and, using a learned inverse kinematic facial self-model, coexpress the smile simultaneously with the human. We demonstrated this ability using a robot face comprising 26 degrees of freedom. We believe that the ability to coexpress simultaneous facial expressions could improve human-robot interaction.
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
