{"title":"A Self-sensing TSA-actuated Anthropomorphic Robot Hand","authors":"Chanchan Xu, Shuai Dong, Yifan Ma, Jingwei Zhan, Yucheng Wang, Xiaojie Wang","doi":"10.1007/s42235-024-00491-w","DOIUrl":null,"url":null,"abstract":"<div><p>This paper introduces a self-sensing anthropomorphic robot hand driven by Twisted String Actuators (TSAs). The use of TSAs provides several advantages such as muscle-like structures, high transmission ratios, large output forces, high efficiency, compactness, inherent compliance, and the ability to transmit power over distances. However, conventional sensors used in TSA-actuated robotic hands increase stiffness, mass, volume, and complexity, making feedback control challenging. To address this issue, a novel self-sensing approach is proposed using strain-sensing string based on Conductive Polymer Composite (CPC). By measuring the resistance changes in the strain-sensing string, the bending angle of the robot hand's fingers can be estimated, enabling closed-loop control without external sensors. The developed self-sensing anthropomorphic robot hand comprises a 3D-printed structure with five fingers, a palm, five self-sensing TSAs, and a 3D-printed forearm. Experimental studies validate the self-sensing properties of the TSA and the anthropomorphic robot hand. Additionally, a real-time Virtual Reality (VR) monitoring system is implemented for visualizing and monitoring the robot hand's movements using its self-sensing capabilities. This research contributes valuable insights and advancements to the field of intelligent prosthetics and robotic end grippers.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"21 3","pages":"1174 - 1190"},"PeriodicalIF":5.8000,"publicationDate":"2024-03-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-024-00491-w","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
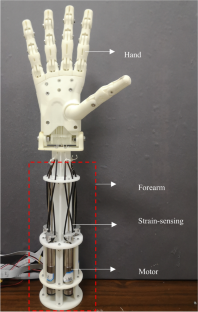
This paper introduces a self-sensing anthropomorphic robot hand driven by Twisted String Actuators (TSAs). The use of TSAs provides several advantages such as muscle-like structures, high transmission ratios, large output forces, high efficiency, compactness, inherent compliance, and the ability to transmit power over distances. However, conventional sensors used in TSA-actuated robotic hands increase stiffness, mass, volume, and complexity, making feedback control challenging. To address this issue, a novel self-sensing approach is proposed using strain-sensing string based on Conductive Polymer Composite (CPC). By measuring the resistance changes in the strain-sensing string, the bending angle of the robot hand's fingers can be estimated, enabling closed-loop control without external sensors. The developed self-sensing anthropomorphic robot hand comprises a 3D-printed structure with five fingers, a palm, five self-sensing TSAs, and a 3D-printed forearm. Experimental studies validate the self-sensing properties of the TSA and the anthropomorphic robot hand. Additionally, a real-time Virtual Reality (VR) monitoring system is implemented for visualizing and monitoring the robot hand's movements using its self-sensing capabilities. This research contributes valuable insights and advancements to the field of intelligent prosthetics and robotic end grippers.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
