Accurate error compensation method for multi-axis parallel machine via singularized jacobi geometric parameter correction and coupling error evaluation
Yuheng Luo , Jian Gao , Disai Chen , Lanyu Zhang , Yachao Liu , Yongbin Zhong
{"title":"Accurate error compensation method for multi-axis parallel machine via singularized jacobi geometric parameter correction and coupling error evaluation","authors":"Yuheng Luo , Jian Gao , Disai Chen , Lanyu Zhang , Yachao Liu , Yongbin Zhong","doi":"10.1016/j.rcim.2024.102771","DOIUrl":null,"url":null,"abstract":"<div><p>The Jacobian model is a prevalent tool for error compensation in multi-axis parallel mechanisms. However, discrepancies between the model's nominal and actual geometrical parameters, combined with equivalent replacements and high-order rounding in the modeling process, lead to equation solving challenges and modeling errors. These inaccuracies result in residual errors in the Jacobian model compensation. To address these problems, this paper proposes an optimal Jacobian correction approach. This is based on a geometrical parameter singularized Jacobian correction model, and a module for the evaluation of coupling errors for multi-axis parallel mechanisms was incorporated. Instead of relying on iterative processes, a singularized geometrical error solution method (SESM) was developed. Through this method, precise derivation of the Jacobian correction parameters is ensured, effectively addressing the indefinite equation challenge and partial posture non-solution problem. Moreover, modeling errors resulting from equivalent infinitesimal replacements and the overlooking of high-order minor values are compensated for by the SESM. It was observed that varying singularized geometrical parameters in the Jacobian model can produce different coupling effects and compensation outcomes. Therefore, a sensitivity-based error predictive evaluation method (EPEM) was introduced. By this method, the optimal correction parameter of the Jacobian model across the entire workspace is identified, ensuring precise pose error compensation. The proposed method was validated using a three-axis parallel mechanism. Through these tests, its superior efficacy was revealed. In comparison to the traditional uncorrected Jacobian compensation, reductions in position and orientation errors by 64.93% and 55.29%, respectively, were achieved. This method provides a new approach for error modeling, equation solving, and parameter correction for multi-axis mechanism error compensation and precision equipment development.</p></div>","PeriodicalId":21452,"journal":{"name":"Robotics and Computer-integrated Manufacturing","volume":"89 ","pages":"Article 102771"},"PeriodicalIF":11.4000,"publicationDate":"2024-10-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Robotics and Computer-integrated Manufacturing","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0736584524000577","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/4/3 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS","Score":null,"Total":0}
引用次数: 0
Abstract
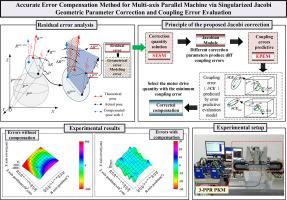
The Jacobian model is a prevalent tool for error compensation in multi-axis parallel mechanisms. However, discrepancies between the model's nominal and actual geometrical parameters, combined with equivalent replacements and high-order rounding in the modeling process, lead to equation solving challenges and modeling errors. These inaccuracies result in residual errors in the Jacobian model compensation. To address these problems, this paper proposes an optimal Jacobian correction approach. This is based on a geometrical parameter singularized Jacobian correction model, and a module for the evaluation of coupling errors for multi-axis parallel mechanisms was incorporated. Instead of relying on iterative processes, a singularized geometrical error solution method (SESM) was developed. Through this method, precise derivation of the Jacobian correction parameters is ensured, effectively addressing the indefinite equation challenge and partial posture non-solution problem. Moreover, modeling errors resulting from equivalent infinitesimal replacements and the overlooking of high-order minor values are compensated for by the SESM. It was observed that varying singularized geometrical parameters in the Jacobian model can produce different coupling effects and compensation outcomes. Therefore, a sensitivity-based error predictive evaluation method (EPEM) was introduced. By this method, the optimal correction parameter of the Jacobian model across the entire workspace is identified, ensuring precise pose error compensation. The proposed method was validated using a three-axis parallel mechanism. Through these tests, its superior efficacy was revealed. In comparison to the traditional uncorrected Jacobian compensation, reductions in position and orientation errors by 64.93% and 55.29%, respectively, were achieved. This method provides a new approach for error modeling, equation solving, and parameter correction for multi-axis mechanism error compensation and precision equipment development.
期刊介绍:
The journal, Robotics and Computer-Integrated Manufacturing, focuses on sharing research applications that contribute to the development of new or enhanced robotics, manufacturing technologies, and innovative manufacturing strategies that are relevant to industry. Papers that combine theory and experimental validation are preferred, while review papers on current robotics and manufacturing issues are also considered. However, papers on traditional machining processes, modeling and simulation, supply chain management, and resource optimization are generally not within the scope of the journal, as there are more appropriate journals for these topics. Similarly, papers that are overly theoretical or mathematical will be directed to other suitable journals. The journal welcomes original papers in areas such as industrial robotics, human-robot collaboration in manufacturing, cloud-based manufacturing, cyber-physical production systems, big data analytics in manufacturing, smart mechatronics, machine learning, adaptive and sustainable manufacturing, and other fields involving unique manufacturing technologies.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
