{"title":"Transfer force perception skills to robot-assisted laminectomy via imitation learning from human demonstrations","authors":"Meng Li, Xiaozhi Qi, Xiaoguang Han, Ying Hu, Bing Li, Yu Zhao, Jianwei Zhang","doi":"10.1049/cit2.12331","DOIUrl":null,"url":null,"abstract":"<p>A comparative study of two force perception skill learning approaches for robot-assisted spinal surgery, the impedance model method and the imitation learning (IL) method, is presented. The impedance model method develops separate models for the surgeon and patient, incorporating spring-damper and bone-grinding models. Expert surgeons' feature parameters are collected and mapped using support vector regression and image navigation techniques. The imitation learning approach utilises long short-term memory networks (LSTM) and addresses accurate data labelling challenges with custom models. Experimental results demonstrate skill recognition rates of 63.61%–74.62% for the impedance model approach, relying on manual feature extraction. Conversely, the imitation learning approach achieves a force perception recognition rate of 91.06%, outperforming the impedance model on curved bone surfaces. The findings demonstrate the potential of imitation learning to enhance skill acquisition in robot-assisted spinal surgery by eliminating the laborious process of manual feature extraction.</p>","PeriodicalId":46211,"journal":{"name":"CAAI Transactions on Intelligence Technology","volume":"9 4","pages":"903-916"},"PeriodicalIF":7.3000,"publicationDate":"2024-03-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/cit2.12331","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"CAAI Transactions on Intelligence Technology","FirstCategoryId":"94","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/cit2.12331","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
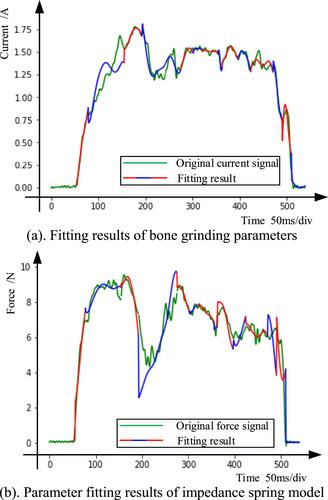
A comparative study of two force perception skill learning approaches for robot-assisted spinal surgery, the impedance model method and the imitation learning (IL) method, is presented. The impedance model method develops separate models for the surgeon and patient, incorporating spring-damper and bone-grinding models. Expert surgeons' feature parameters are collected and mapped using support vector regression and image navigation techniques. The imitation learning approach utilises long short-term memory networks (LSTM) and addresses accurate data labelling challenges with custom models. Experimental results demonstrate skill recognition rates of 63.61%–74.62% for the impedance model approach, relying on manual feature extraction. Conversely, the imitation learning approach achieves a force perception recognition rate of 91.06%, outperforming the impedance model on curved bone surfaces. The findings demonstrate the potential of imitation learning to enhance skill acquisition in robot-assisted spinal surgery by eliminating the laborious process of manual feature extraction.
期刊介绍:
CAAI Transactions on Intelligence Technology is a leading venue for original research on the theoretical and experimental aspects of artificial intelligence technology. We are a fully open access journal co-published by the Institution of Engineering and Technology (IET) and the Chinese Association for Artificial Intelligence (CAAI) providing research which is openly accessible to read and share worldwide.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
