{"title":"Design and Control of an Autonomous Bat-like Perching UAV","authors":"Long Bai, Wei Wang, Xiaohong Chen, Yuanxi Sun","doi":"10.1007/s42235-024-00502-w","DOIUrl":null,"url":null,"abstract":"<div><p>Perching allows small Unmanned Aerial Vehicles (UAVs) to maintain their altitude while significantly extending their flight duration and reducing noise. However, current research on flying habitats is poorly adapted to unstructured environments, and lacks autonomous capabilities, requiring ideal experimental environments and remote control by personnel. To solve these problems, in this paper, we propose a bat-like UAV perching mechanism by investigating the bat upside-down perching method, which realizes double self-locking in the perching state using the ratchet and four-link dead point mechanisms. Based on this perching mechanism, this study proposes a control strategy for UAVs to track targets and accomplish flight perching autonomously by combining a binocular camera, single-point LiDAR, and pressure sensors. Autonomous perching experiments were conducted for crossbar-type objects outdoors. The experimental results show that a multirotor UAV equipped with the perching mechanism and sensors can reliably achieve autonomous flight perching and re-flying off the target outdoors. The power consumption is reduced to 2.9% of the hovering state when perched on the target object.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"21 3","pages":"1253 - 1264"},"PeriodicalIF":5.8000,"publicationDate":"2024-04-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-024-00502-w","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
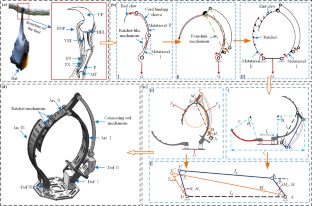
Perching allows small Unmanned Aerial Vehicles (UAVs) to maintain their altitude while significantly extending their flight duration and reducing noise. However, current research on flying habitats is poorly adapted to unstructured environments, and lacks autonomous capabilities, requiring ideal experimental environments and remote control by personnel. To solve these problems, in this paper, we propose a bat-like UAV perching mechanism by investigating the bat upside-down perching method, which realizes double self-locking in the perching state using the ratchet and four-link dead point mechanisms. Based on this perching mechanism, this study proposes a control strategy for UAVs to track targets and accomplish flight perching autonomously by combining a binocular camera, single-point LiDAR, and pressure sensors. Autonomous perching experiments were conducted for crossbar-type objects outdoors. The experimental results show that a multirotor UAV equipped with the perching mechanism and sensors can reliably achieve autonomous flight perching and re-flying off the target outdoors. The power consumption is reduced to 2.9% of the hovering state when perched on the target object.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
