{"title":"APFA: Ameliorated Pathfinder Algorithm for Engineering Applications","authors":"Keyu Zhong, Fen Xiao, Xieping Gao","doi":"10.1007/s42235-024-00510-w","DOIUrl":null,"url":null,"abstract":"<div><p>Pathfinder algorithm (PFA) is a swarm intelligent optimization algorithm inspired by the collective activity behavior of swarm animals, imitating the leader in the population to guide followers in finding the best food source. This algorithm has the characteristics of a simple structure and high performance. However, PFA faces challenges such as insufficient population diversity and susceptibility to local optima due to its inability to effectively balance the exploration and exploitation capabilities. This paper proposes an Ameliorated Pathfinder Algorithm called APFA to solve complex engineering optimization problems. Firstly, a guidance mechanism based on multiple elite individuals is presented to enhance the global search capability of the algorithm. Secondly, to improve the exploration efficiency of the algorithm, the Logistic chaos mapping is introduced to help the algorithm find more high-quality potential solutions while avoiding the worst solutions. Thirdly, a comprehensive following strategy is designed to avoid the algorithm falling into local optima and further improve the convergence speed. These three strategies achieve an effective balance between exploration and exploitation overall, thus improving the optimization performance of the algorithm. In performance evaluation, APFA is validated by the CEC2022 benchmark test set and five engineering optimization problems, and compared with the state-of-the-art metaheuristic algorithms. The numerical experimental results demonstrated the superiority of APFA.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"21 3","pages":"1592 - 1616"},"PeriodicalIF":5.8000,"publicationDate":"2024-04-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-024-00510-w","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
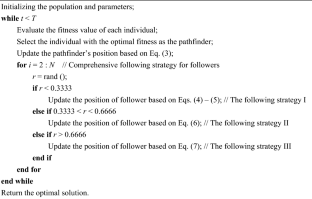
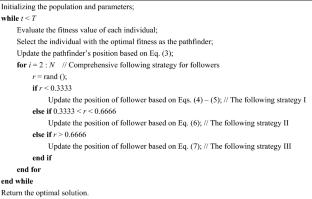
Pathfinder algorithm (PFA) is a swarm intelligent optimization algorithm inspired by the collective activity behavior of swarm animals, imitating the leader in the population to guide followers in finding the best food source. This algorithm has the characteristics of a simple structure and high performance. However, PFA faces challenges such as insufficient population diversity and susceptibility to local optima due to its inability to effectively balance the exploration and exploitation capabilities. This paper proposes an Ameliorated Pathfinder Algorithm called APFA to solve complex engineering optimization problems. Firstly, a guidance mechanism based on multiple elite individuals is presented to enhance the global search capability of the algorithm. Secondly, to improve the exploration efficiency of the algorithm, the Logistic chaos mapping is introduced to help the algorithm find more high-quality potential solutions while avoiding the worst solutions. Thirdly, a comprehensive following strategy is designed to avoid the algorithm falling into local optima and further improve the convergence speed. These three strategies achieve an effective balance between exploration and exploitation overall, thus improving the optimization performance of the algorithm. In performance evaluation, APFA is validated by the CEC2022 benchmark test set and five engineering optimization problems, and compared with the state-of-the-art metaheuristic algorithms. The numerical experimental results demonstrated the superiority of APFA.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
