{"title":"Recursive attention collaboration network for single image de-raining","authors":"Zhitong Li, Xiaodong Li, Zhaozhe Gong, Zhensheng Yu","doi":"10.1049/csy2.12115","DOIUrl":null,"url":null,"abstract":"<p>Single-image rain removal is an important problem in the field of computer vision aimed at recovering clean images from rainy images. In recent years, data-driven convolutional neural network (CNN)-based rain removal methods have achieved significant results, but most of them cannot fully focus on the contextual information in rain-containing images, which leads to the failure of recovering some of the background details of the images that have been corrupted due to the aggregation of rain streaks. With the success of Transformer-based models in the field of computer vision, global features can be easily acquired to better help recover details in the background of an image. However, Transformer-based models often require a large number of parameters during the training process, which makes the training process very difficult and makes it difficult to apply them to specific devices for execution in reality. The authors propose a Recursive Attention Collaboration Network, which consists of a recursive Swin-transformer block (STB) and a CNN-based feature fusion block. The authors designed the Recursively Integrate Transformer Block (RITB), which consists of several STBs recursively connected, that can effectively reduce the number of parameters of the model. The final part of the module can integrate the local information from the STBs. The authors also design the Feature Enhancement Block, which can better recover the details of the background information corrupted by rain streaks of different density shapes through the features passed from the RITB. Experiments show that the proposed network has an effective rain removal effect on both synthetic and real datasets and has fewer model parameters than other mainstream methods.</p>","PeriodicalId":34110,"journal":{"name":"IET Cybersystems and Robotics","volume":"6 2","pages":""},"PeriodicalIF":1.2000,"publicationDate":"2024-04-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/csy2.12115","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Cybersystems and Robotics","FirstCategoryId":"1085","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/csy2.12115","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
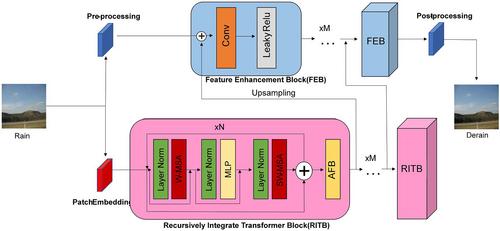
Single-image rain removal is an important problem in the field of computer vision aimed at recovering clean images from rainy images. In recent years, data-driven convolutional neural network (CNN)-based rain removal methods have achieved significant results, but most of them cannot fully focus on the contextual information in rain-containing images, which leads to the failure of recovering some of the background details of the images that have been corrupted due to the aggregation of rain streaks. With the success of Transformer-based models in the field of computer vision, global features can be easily acquired to better help recover details in the background of an image. However, Transformer-based models often require a large number of parameters during the training process, which makes the training process very difficult and makes it difficult to apply them to specific devices for execution in reality. The authors propose a Recursive Attention Collaboration Network, which consists of a recursive Swin-transformer block (STB) and a CNN-based feature fusion block. The authors designed the Recursively Integrate Transformer Block (RITB), which consists of several STBs recursively connected, that can effectively reduce the number of parameters of the model. The final part of the module can integrate the local information from the STBs. The authors also design the Feature Enhancement Block, which can better recover the details of the background information corrupted by rain streaks of different density shapes through the features passed from the RITB. Experiments show that the proposed network has an effective rain removal effect on both synthetic and real datasets and has fewer model parameters than other mainstream methods.





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
