{"title":"High-Performance and High Bandwidth Electroadhesive Clutch Enabled by Fracture Mechanics and a Dielectric Nanoparticle-Based High-k Composite","authors":"Changhyun Choi, Sophia Gardner, Sitangshu Chatterjee, Aditya Kuchibhotla, Guangchao Wan, M. Cynthia Hipwell","doi":"10.1002/admt.202301949","DOIUrl":null,"url":null,"abstract":"<p>Clutches are integral components in robotic systems, enabling programming of system stiffness and precise control over a wide range of motion types. While different types of clutches exist, electroadhesive (EA) clutches present several key advantages, such as flexibility, low mass, low power consumption, simplicity, and fast response. Achieving high EA stress in EA clutches has remained a challenge, however, necessitating high voltage input or a large contact area to achieve the desired force. In this work, an EA clutch is proposed with a high EA stress achieved by taking fracture mechanics into account and using a high dielectric composite layer while still maintaining a comparable high switching speed to other dielectric-based EA clutches. The maximum EA stress is observed to be 108.8 N cm<sup>−2</sup>, which is four times larger than what has been reported previously among dielectric-based EA clutches at room temperature. This high EA stress clutch can facilitate miniaturization and lower the operating voltage as well as extend to high load capacity applications. The proposed approach holds promise for advancements in various domains, including haptics (both kinesthetic and cutaneous), exoskeletons, walking robots, and other systems that require compliance, low mass, and precise force control.</p>","PeriodicalId":7292,"journal":{"name":"Advanced Materials Technologies","volume":"9 14","pages":""},"PeriodicalIF":6.4000,"publicationDate":"2024-05-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/admt.202301949","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Materials Technologies","FirstCategoryId":"88","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/admt.202301949","RegionNum":3,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
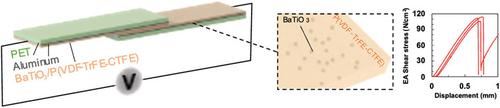
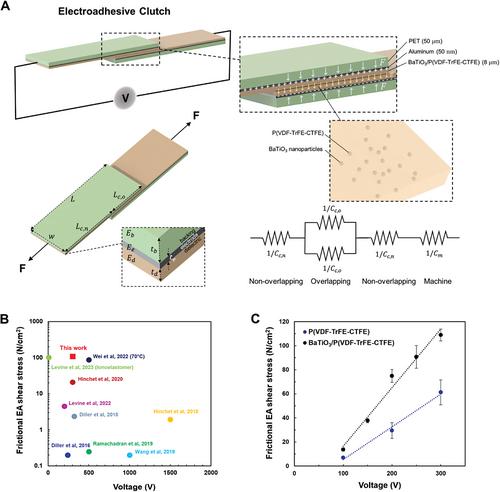
Clutches are integral components in robotic systems, enabling programming of system stiffness and precise control over a wide range of motion types. While different types of clutches exist, electroadhesive (EA) clutches present several key advantages, such as flexibility, low mass, low power consumption, simplicity, and fast response. Achieving high EA stress in EA clutches has remained a challenge, however, necessitating high voltage input or a large contact area to achieve the desired force. In this work, an EA clutch is proposed with a high EA stress achieved by taking fracture mechanics into account and using a high dielectric composite layer while still maintaining a comparable high switching speed to other dielectric-based EA clutches. The maximum EA stress is observed to be 108.8 N cm−2, which is four times larger than what has been reported previously among dielectric-based EA clutches at room temperature. This high EA stress clutch can facilitate miniaturization and lower the operating voltage as well as extend to high load capacity applications. The proposed approach holds promise for advancements in various domains, including haptics (both kinesthetic and cutaneous), exoskeletons, walking robots, and other systems that require compliance, low mass, and precise force control.
离合器是机器人系统中不可或缺的部件,可对系统刚度进行编程,并对各种运动类型进行精确控制。虽然存在不同类型的离合器,但电粘性(EA)离合器具有灵活性、低质量、低功耗、简单和快速响应等几大优势。然而,在 EA 离合器中实现高 EA 应力仍然是一项挑战,需要高电压输入或大接触面积才能达到所需的力。本研究提出了一种 EA 离合器,通过考虑断裂力学和使用高介电复合层实现了高 EA 应力,同时仍能保持与其他基于介电的 EA 离合器相当的高开关速度。观察到的最大 EA 应力为 108.8 N cm-2,比之前报道的室温下基于介质的 EA 离合器大四倍。这种高 EA 应力离合器可以促进微型化,降低工作电压,并扩展到高负载能力应用领域。所提出的方法有望在多个领域取得进展,包括触觉(动觉和皮肤)、外骨骼、行走机器人和其他需要顺应性、低质量和精确力控制的系统。
期刊介绍:
Advanced Materials Technologies Advanced Materials Technologies is the new home for all technology-related materials applications research, with particular focus on advanced device design, fabrication and integration, as well as new technologies based on novel materials. It bridges the gap between fundamental laboratory research and industry.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
