{"title":"Closed-loop optogenetic neuromodulation enables high-fidelity fatigue-resistant muscle control","authors":"Guillermo Herrera-Arcos, Hyungeun Song, Seong Ho Yeon, Omkar Ghenand, Samantha Gutierrez-Arango, Sapna Sinha, Hugh Herr","doi":"10.1126/scirobotics.adi8995","DOIUrl":null,"url":null,"abstract":"<div >Closed-loop neuroprostheses show promise in restoring motion in individuals with neurological conditions. However, conventional activation strategies based on functional electrical stimulation (FES) fail to accurately modulate muscle force and exhibit rapid fatigue because of their unphysiological recruitment mechanism. Here, we present a closed-loop control framework that leverages physiological force modulation under functional optogenetic stimulation (FOS) to enable high-fidelity muscle control for extended periods of time (>60 minutes) in vivo. We first uncovered the force modulation characteristic of FOS, showing more physiological recruitment and significantly higher modulation ranges (>320%) compared with FES. Second, we developed a neuromuscular model that accurately describes the highly nonlinear dynamics of optogenetically stimulated muscle. Third, on the basis of the optogenetic model, we demonstrated real-time control of muscle force with improved performance and fatigue resistance compared with FES. This work lays the foundation for fatigue-resistant neuroprostheses and optogenetically controlled biohybrid robots with high-fidelity force modulation.</div>","PeriodicalId":56029,"journal":{"name":"Science Robotics","volume":"9 90","pages":""},"PeriodicalIF":27.5000,"publicationDate":"2024-05-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.science.org/doi/reader/10.1126/scirobotics.adi8995","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science Robotics","FirstCategoryId":"94","ListUrlMain":"https://www.science.org/doi/10.1126/scirobotics.adi8995","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
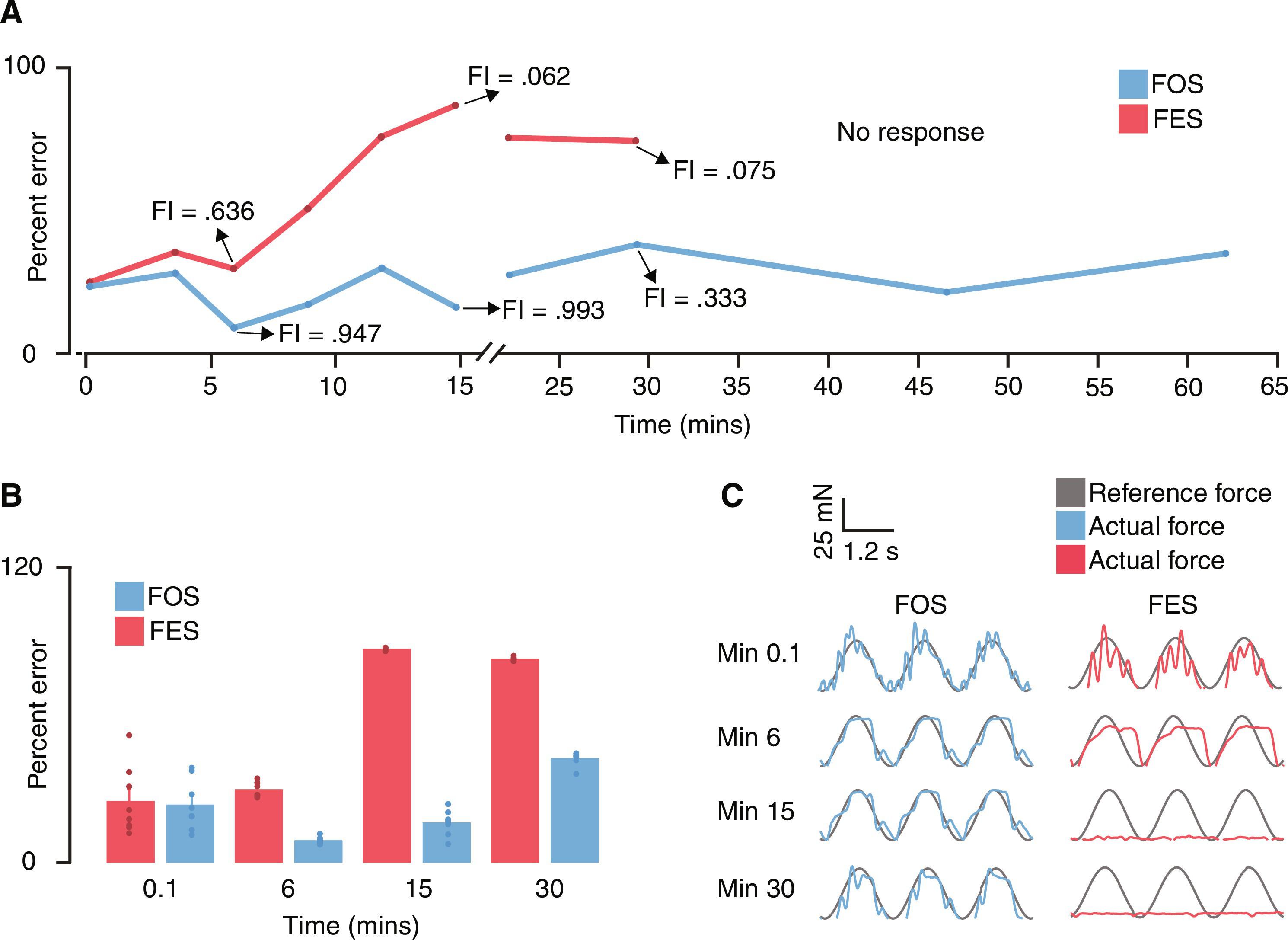
Closed-loop neuroprostheses show promise in restoring motion in individuals with neurological conditions. However, conventional activation strategies based on functional electrical stimulation (FES) fail to accurately modulate muscle force and exhibit rapid fatigue because of their unphysiological recruitment mechanism. Here, we present a closed-loop control framework that leverages physiological force modulation under functional optogenetic stimulation (FOS) to enable high-fidelity muscle control for extended periods of time (>60 minutes) in vivo. We first uncovered the force modulation characteristic of FOS, showing more physiological recruitment and significantly higher modulation ranges (>320%) compared with FES. Second, we developed a neuromuscular model that accurately describes the highly nonlinear dynamics of optogenetically stimulated muscle. Third, on the basis of the optogenetic model, we demonstrated real-time control of muscle force with improved performance and fatigue resistance compared with FES. This work lays the foundation for fatigue-resistant neuroprostheses and optogenetically controlled biohybrid robots with high-fidelity force modulation.
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
