Yan Guan, Yang Wang, Rui Yin, Mingshu Chen, Yaqi Xu
{"title":"Vibration Suppression and Trajectory Tracking Control of Flexible Joint Manipulator Based on PSO Algorithm and Fixed-Time Control","authors":"Yan Guan, Yang Wang, Rui Yin, Mingshu Chen, Yaqi Xu","doi":"10.1155/2024/5510259","DOIUrl":null,"url":null,"abstract":"<div>\n <p>In this paper, the vibration suppression and trajectory tracking control of a flexible joint manipulator (FJM) based on particle swarm optimization (PSO) and fixed-time nonsingular terminal sliding mode control (NTSMC) are studied. Firstly, in order to suppress the residual vibration of the FJM, an optimal trajectory planning method based on higher-order trajectory planning (HOTP) and the PSO algorithm is proposed. Then, to ensure that the FJM can track the optimized trajectory without being affected by the initial value of the trajectory, a novel fixed-time NTSMC scheme is proposed. Compared with the cubic spline trajectory, the proposed HOTP is smoother and can more accurately suppress the residual vibration of the FJM. By combining the HOTP with the PSO algorithm, the vibration amplitude of FJM can be suppressed to around 0.002 mm. Unlike finite-time NTSMC, the rate of convergence of the proposed fixed-time NTSMC does not depend on the initial value of FJM’s joint trajectory. Especially when the initial value of the trajectory is large, the FJM can still quickly track the optimal trajectory within 0 to 1 s. Finally, the effectiveness of this method is verified through simulation and comparison.</p>\n </div>","PeriodicalId":14089,"journal":{"name":"International Journal of Intelligent Systems","volume":"2024 1","pages":""},"PeriodicalIF":3.7000,"publicationDate":"2024-06-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1155/2024/5510259","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Intelligent Systems","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1155/2024/5510259","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
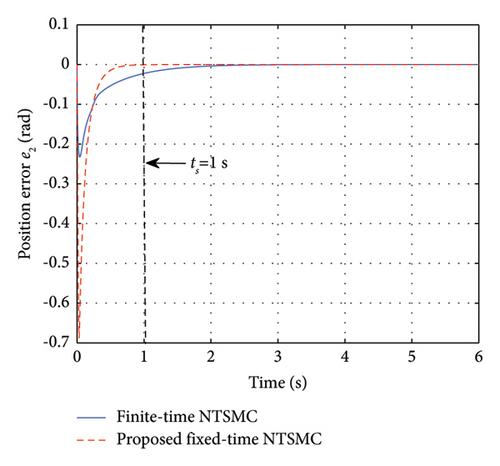
In this paper, the vibration suppression and trajectory tracking control of a flexible joint manipulator (FJM) based on particle swarm optimization (PSO) and fixed-time nonsingular terminal sliding mode control (NTSMC) are studied. Firstly, in order to suppress the residual vibration of the FJM, an optimal trajectory planning method based on higher-order trajectory planning (HOTP) and the PSO algorithm is proposed. Then, to ensure that the FJM can track the optimized trajectory without being affected by the initial value of the trajectory, a novel fixed-time NTSMC scheme is proposed. Compared with the cubic spline trajectory, the proposed HOTP is smoother and can more accurately suppress the residual vibration of the FJM. By combining the HOTP with the PSO algorithm, the vibration amplitude of FJM can be suppressed to around 0.002 mm. Unlike finite-time NTSMC, the rate of convergence of the proposed fixed-time NTSMC does not depend on the initial value of FJM’s joint trajectory. Especially when the initial value of the trajectory is large, the FJM can still quickly track the optimal trajectory within 0 to 1 s. Finally, the effectiveness of this method is verified through simulation and comparison.
期刊介绍:
The International Journal of Intelligent Systems serves as a forum for individuals interested in tapping into the vast theories based on intelligent systems construction. With its peer-reviewed format, the journal explores several fascinating editorials written by today''s experts in the field. Because new developments are being introduced each day, there''s much to be learned — examination, analysis creation, information retrieval, man–computer interactions, and more. The International Journal of Intelligent Systems uses charts and illustrations to demonstrate these ground-breaking issues, and encourages readers to share their thoughts and experiences.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
