{"title":"A hybrid model for pre-compensating servo error in the ball screw system based on high-bandwidth controller","authors":"Min Wan, Xiao-Zhe Ma, Jia Dai, Wei-Hong Zhang","doi":"10.1016/j.cirpj.2024.06.002","DOIUrl":null,"url":null,"abstract":"<div><p>This article presents a hybrid model to predict the positions of the ball screw drive system of machine tool and then modify the trajectory through constructing a pre-compensation method to reduce servo errors in machine motion axes. To achieve this objective, a flexible control model is initially developed to characterize the ball screw drive system, and by leveraging this model, a high-bandwidth controller is constructed, with its physical representation, i.e. the state-space equation, being derived. Subsequently, a data-driven hybrid model is proposed to predict the positions of the ball screw drive system concerning the next multiple time steps from the current time step, and then the predicted positions associated with these steps are utilized as initial conditions to adjust and compensate for the physical model’s prediction errors corresponding to these multiple time steps. As a result, a compensated trajectory with high tracking accuracy is generated. Finally, experiments confirm that the proposed prediction method offers superior prediction accuracy and enhanced adaptability, and the pre-compensated trajectory leads to reduced tracking errors.</p></div>","PeriodicalId":56011,"journal":{"name":"CIRP Journal of Manufacturing Science and Technology","volume":"52 ","pages":"Pages 175-187"},"PeriodicalIF":5.4000,"publicationDate":"2024-06-10","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"CIRP Journal of Manufacturing Science and Technology","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S1755581724000816","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, MANUFACTURING","Score":null,"Total":0}
引用次数: 0
Abstract
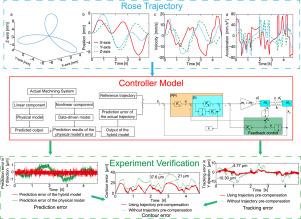
This article presents a hybrid model to predict the positions of the ball screw drive system of machine tool and then modify the trajectory through constructing a pre-compensation method to reduce servo errors in machine motion axes. To achieve this objective, a flexible control model is initially developed to characterize the ball screw drive system, and by leveraging this model, a high-bandwidth controller is constructed, with its physical representation, i.e. the state-space equation, being derived. Subsequently, a data-driven hybrid model is proposed to predict the positions of the ball screw drive system concerning the next multiple time steps from the current time step, and then the predicted positions associated with these steps are utilized as initial conditions to adjust and compensate for the physical model’s prediction errors corresponding to these multiple time steps. As a result, a compensated trajectory with high tracking accuracy is generated. Finally, experiments confirm that the proposed prediction method offers superior prediction accuracy and enhanced adaptability, and the pre-compensated trajectory leads to reduced tracking errors.
期刊介绍:
The CIRP Journal of Manufacturing Science and Technology (CIRP-JMST) publishes fundamental papers on manufacturing processes, production equipment and automation, product design, manufacturing systems and production organisations up to the level of the production networks, including all the related technical, human and economic factors. Preference is given to contributions describing research results whose feasibility has been demonstrated either in a laboratory or in the industrial praxis. Case studies and review papers on specific issues in manufacturing science and technology are equally encouraged.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
